









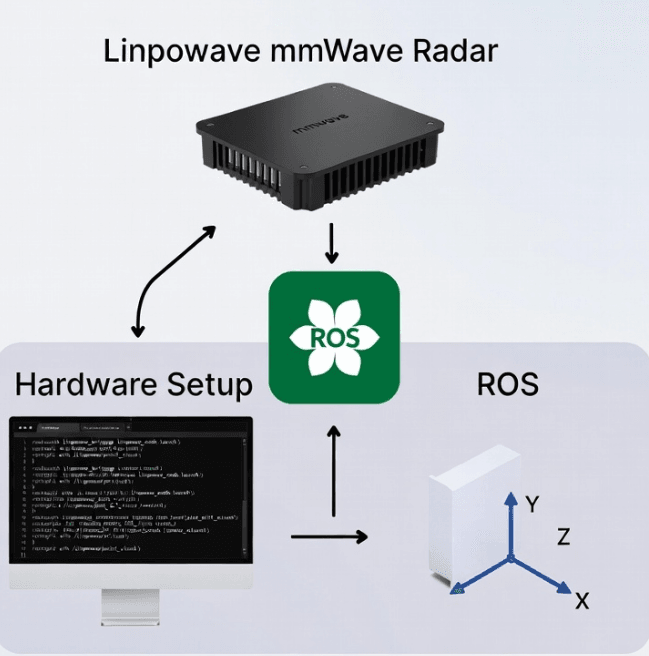
مع استمرار نمو الطلب على الأنظمة المستقلة والاستشعار الذكي، أصبح دمج رادار Linpowave mmWave مع نظام تشغيل الروبوت (ROS) خطوة رئيسية في بناء أنظمة الإدراك والأتمتة المتقدمة.
يرشدك هذا الدليل خلال كل خطوة - من إعداد الأجهزة وتثبيت برامج التشغيل إلى تصور البيانات والتطوير المتقدم.
1. إعداد الأجهزة وإعداد البيئة
1.1 متطلبات الأجهزة
طراز الرادار: سلسلة رادار Linpowave mmWave (متوافق مع بروتوكولات اتصالات ROS)
نظام الاستضافة: Ubuntu 18.04/20.04 (ROS Melodic/Noetic) أو Ubuntu 22.04 (ROS2 Humble)
اتصال:
محول USB إلى تسلسلي (على سبيل المثال، FTDI XDS110) لتوصيل الرادار بالمضيف
مصدر طاقة اختياري 5 فولت 3 أمبير للتشغيل المستقل المستقر
1.2 تثبيت البرنامج
تثبيت ROS1 (مثال على Ubuntu 20.04)
تثبيت ROS2 (مثال على Ubuntu 22.04)
لمزيد من التفاصيل حول البرامج المتوافقة وحزم SDK، قم بزيارة
👉 وثائق SDK Linpowave
2. تثبيت وتكوين برامج تشغيل Linpowave Radar ROS
2.1 تثبيت برنامج تشغيل ROS1
استنساخ مستودع برامج تشغيل Linpowave mmWave ROS
إعداد أذونات المستخدم
2.2 تعريف الرسالة المخصصة لـ ROS2
إذا كنت تستخدم ROS2، فقم بتحديد رسالة مخصصة لنقاط الكشف:
ثم قم بإنشاء الواجهة:
3. جمع البيانات ومعالجتها
3.1 إطلاق عقدة الرادار
لإعداد رادار واحد:
لتكوين الرادار المتعدد (مثال على تحويل الإحداثيات):
3.2 تحليل البيانات وتخزينها
لتخزين بيانات الرادار بتنسيق PCD:
للمستخدمين المتقدمين، يوفر Linpowave واجهة بيانات ثنائية لتحليل بيانات IQ المباشر وبيانات دوبلر النطاق. انظر:
🔗 الوثائق الفنية لـ Linpowave
4. التصور والتطوير المتقدم
4.1 عرض سحابة النقاط RViz
تشغيل RViz:
أضف PointCloud2 وحدد موضوع
/linpowave/rscanتكوين معلمات التصور:
مخطط الألوان: الكثافة أو الارتفاع (المحور Z)
وقت الاضمحلال: تعديل لاستمرارية الكائن المتحرك
محاذاة TF: محاذاة إطار الرادار مع إطار قاعدة الروبوت
4.2 تجميع الكائنات وتتبعها
يمكن معالجة سحب نقاط الرادار للتجميع والتتبع:
يمكن استخدام مرشحات كالمان لتتبع الحركة:
4.3 التكامل مفتوح المصدر
تكامل OpenPCDet: تحويل سحابات نقاط Linpowave إلى تنسيق ROS القياسي وإجراء اكتشاف ثلاثي الأبعاد.
جسر الرادار-ROS: استخدام DDS للاتصالات عالية الإنتاجية في ROS2.
دمج أجهزة الاستشعار المتعددة: دمج رادار Linpowave مع الكاميرا أو LiDAR لتحسين الإدراك.
للحصول على أمثلة متعمقة للتكامل، راجع
🔗 وثائق ويكي ROS
🔗 OpenPCDet GitHub
5. استكشاف الأخطاء وإصلاحها
| مشكلة | السبب المحتمل | حل |
|---|---|---|
| لا يوجد تدفق بيانات الرادار | لم يتم تعيين الأذونات التسلسلية | قم بتشغيل sudo chmod 666 /dev/ttyACM* |
| لا توجد سحابة نقاط مرئية في RViz | اسم الموضوع غير صحيح | استخدم /linpowave/rscan |
| عدم محاذاة إطار الرادار | تحويل TF مفقود | إضافة ناشر التحويل الثابت |
| ضوضاء مفرطة في سحابة النقاط | تكوين غير صحيح | ضبط عتبة CFAR في ملف تكوين Linpowave |
6. التطبيقات الموسعة
يمكن لرادار Linpowave mmWave أن يتجاوز مهام الكشف القياسية ويخدم في مجالات الروبوتات المتعددة:
رسم خرائط SLAM: استخدم رادار Linpowave مع Cartographer أو GMapping للحصول على SLAM قائم على الرادار.
التعرف على الإيماءات: تحليل بيانات سحابة النقاط المتسلسلة زمنياً للتحكم في الإيماءات البشرية.
الأتمتة الصناعية: التكامل مع ROS Control للأذرع الروبوتية الموجهة بالرادار وأنظمة التفتيش الآلية.
تعرف على المزيد حول تطبيقات رادار Linpowave على
🔗 تطبيقات Linpowave
7. الأسئلة الشائعة: تكامل رادار Linpowave مع نظام ROS
س1: هل توفر Linpowave حزمة ROS رسمية؟
ج: نعم. تقدم Linpowave حزم ROS1 وROS2 مفتوحة المصدر، بالإضافة إلى مجموعة أدوات تطوير برمجيات كاملة لتكوين الرادار وبث البيانات.
س2: كيف يمكنني تصور بيانات الرادار في الوقت الحقيقي؟
أ: استخدم RViz أو Foxglove Studio لتوضيح موضوعات مثل /linpowave/rscan .
س3: هل يمكن استخدام رادار Linpowave لـ SLAM أو تجنب العوائق؟
ج: بالتأكيد. توفر رادارات Linpowave بيانات كثيفة من سحابة النقاط، مما يُمكّن من رسم الخرائط وتحديد المواقع واكتشاف العوائق في الوقت الفعلي.
س4: كيفية التعامل مع بيانات الرادار الضوضائية أو المتفرقة؟
أ: ضبط عتبات CFAR في ملف تكوين Linpowave أو استخدام مرشحات ما بعد المعالجة مثل التجميع DBSCAN.
س5: أين يمكنني الوصول إلى الوثائق الرسمية ومجموعة أدوات التطوير البرمجية (SDK)؟
أ: قم بزيارة مركز توثيق Linpowave للحصول على برامج التشغيل ومجموعات تطوير البرامج (SDKs) ودروس التكامل.