









فهم دقة الرادار مقابل الدقة
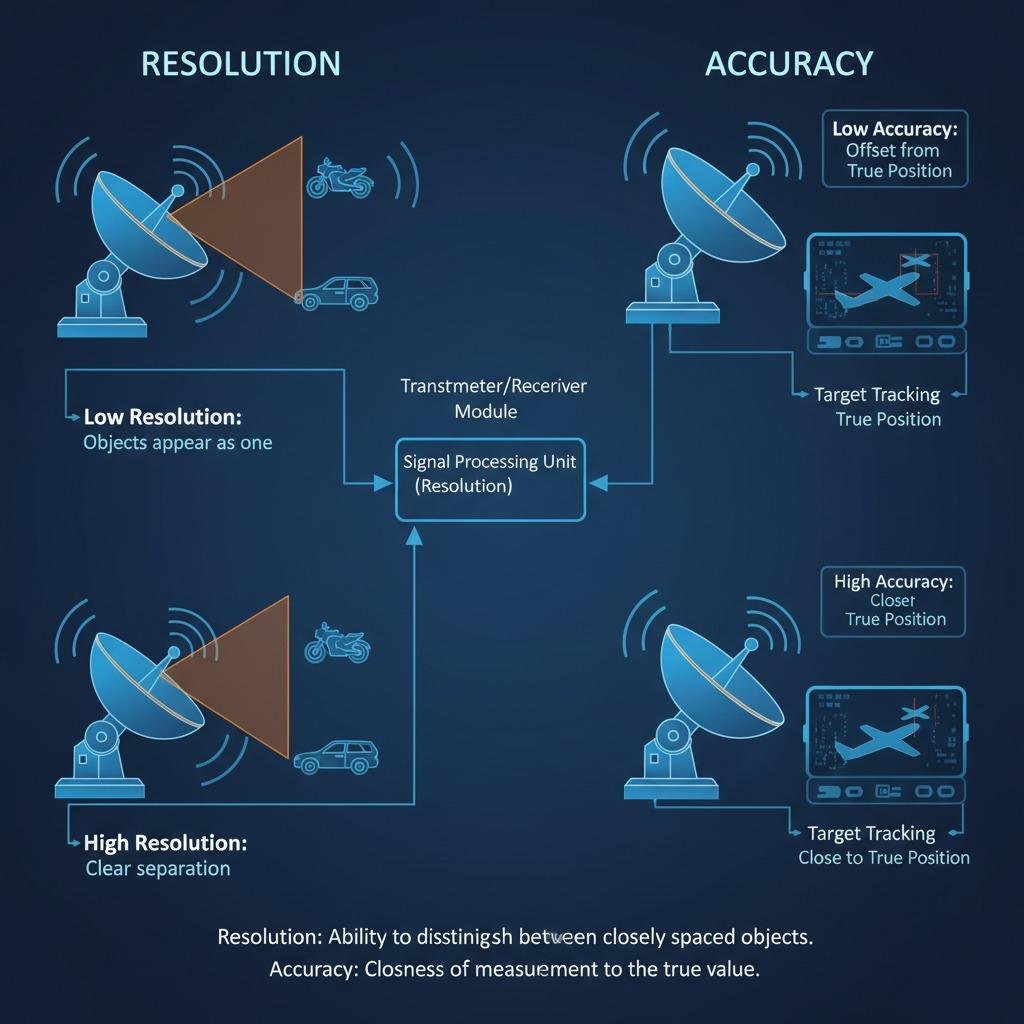
تعد دقة الرادار مقابل الدقة أحد الفروق الأساسية في تكنولوجيا الرادار التي تؤثر على فعاليتها عبر التطبيقات المختلفة، بدءًا من أنظمة سلامة السيارات وحتى المراقبة الصناعية. تشير الدقة إلى قدرة الرادار على التمييز بين الأهداف المتقاربة، وبشكل أساسي مدى دقة قدرته على فصل الأشياء في المكان أو الزمان. ومن ناحية أخرى، تقيس الدقة مدى توافق قياسات الرادار مع المواقع أو السرعات أو الخصائص الحقيقية لتلك الأهداف. من الناحية العملية، تسمح الدقة العالية للنظام باكتشاف العديد من الأشياء القريبة دون تشويشها معًا، بينما تضمن الدقة أن تكون هذه الاكتشافات دقيقة بشكل موثوق. تعتبر هذه المقارنة أمرًا بالغ الأهمية في تصميمات الرادار الحديثة، خاصة في البيئات التي تتطلب أداءً موثوقًا.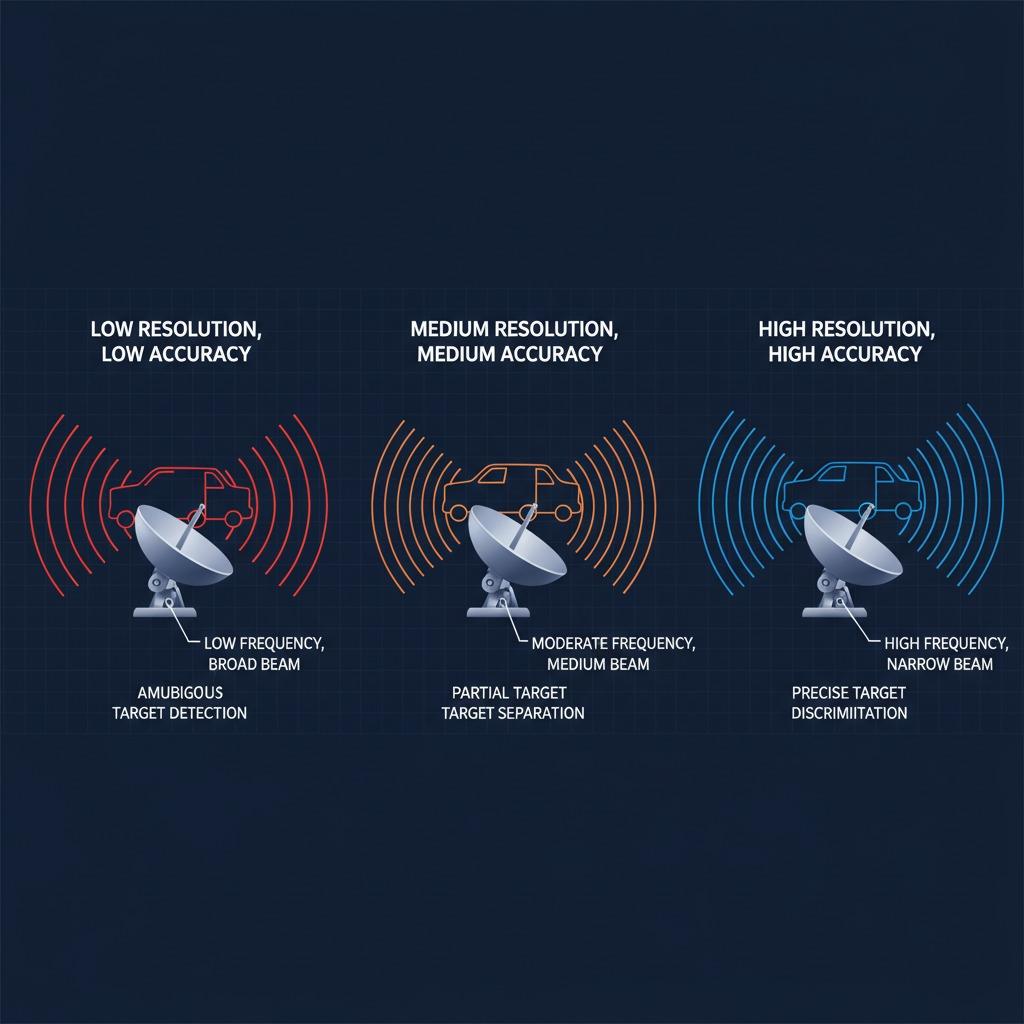
العوامل الرئيسية في أداء رادار الموجة المليمترية
يلعب أداء رادار الموجات المليمترية دورًا محوريًا في تحقيق دقة الرادار المثالية مقابل الدقة، خاصة في النطاقات عالية التردد التي تعمل بين 30 و300 جيجا هرتز. تتفوق هذه الرادارات في الكشف قصير المدى نظرًا لقدرتها على إنتاج حزم ضيقة، مما يعزز الدقة الزاوية والمدى إلى مستويات لا يمكن الوصول إليها بواسطة البدائل ذات التردد المنخفض. على سبيل المثال، يمكن لأنظمة mmWave تحليل الكائنات التي تفصل بينها سنتيمترات فقط، مما يجعلها مثالية لتطبيقات مثل التعرف على الإيماءات أو تجنب الاصطدام. ومع ذلك، فإن أداء هذه الأجهزة يتأثر بتحديات مثل التوهين الجوي، الذي يمكن أن يؤدي إلى انخفاض جودة الإشارة عبر المسافة. وللتخفيف من هذه المشكلة، يركز المهندسون على تحسين مصفوفات الهوائي وخوارزميات معالجة الإشارات، مما يضمن أن الرادار لا يحل التفاصيل الدقيقة فحسب، بل يحافظ أيضًا على قراءات دقيقة في ظل ظروف مختلفة. تشير الإحصائيات الواردة من تقارير الصناعة إلى أن رادارات mmWave تحقق دقة يصل مداها إلى 4 سم، مع دقة ضمن هوامش خطأ تبلغ 1% في الاختبارات الخاضعة للرقابة.
نظرات ثاقبة حول تقنية رادار Linpowave
يمثل رادار Linpowave تكرارًا متقدمًا في مناقشة دقة الرادار مقابل الدقة، مع الاستفادة من معالجة الإشارات الخاصة لتوفير تمييز فائق للهدف. تدمج هذه التقنية تكوينات متعددة المدخلات والمخرجات (MIMO)، مما يسمح بفتحات افتراضية محسنة تعمل على تعزيز الدقة والدقة في وقت واحد. في سيناريوهات العالم الحقيقي، مثل مراقبة حركة المرور في المناطق الحضرية، يمكن لرادار Linpowave التمييز بين المركبات والمشاة على مسافة تصل إلى 200 متر، مع دقة موضعية تتجاوز 95%. بالمقارنة مع الرادارات التقليدية، فهو يقلل من النتائج الإيجابية الكاذبة من خلال تحسين كيفية تفسير الصدى، وبالتالي سد الفجوة بين حدود الدقة النظرية والدقة العملية. يؤكد مطورو Linpowave على قابليته للتوسع من أجل التكامل مع أجهزة إنترنت الأشياء، حيث لا يؤثر الحجم الصغير على مقاييس الأداء.
دور استقرار الإشارة في أنظمة الرادار
يعد استقرار الإشارة حجر الزاوية في تقييم دقة الرادار مقابل الدقة، حيث أن التقلبات في الإشارة المستقبلة يمكن أن تشوه كلا الجانبين. تضمن الإشارات المستقرة سلامة شكل الموجة بشكل متسق، مما يمنع حدوث أخطاء في حسابات إزاحة دوبلر التي تؤثر على دقة السرعة. في البيئات الصاخبة، يتم استخدام تقنيات مثل تعديل الموجة المستمرة ذات التردد (FMCW) للحفاظ على استقرار الإشارة، مما يسمح للرادارات بتحقيق دقة تصل إلى درجة واحدة في الزاوية مع الحفاظ على أخطاء القياس أقل من 0.5 متر في الثانية. تظهر رؤى الدراسات الحديثة أن الرادارات التي تتمتع باستقرار إشارة قوي تتفوق على غيرها بنسبة 20-30% من حيث الدقة أثناء الأحوال الجوية المعاكسة، مما يؤكد أهميتها للتشغيل الموثوق.
التنقل في تحديات التفكير متعدد المسارات
يشكل الانعكاس متعدد المسارات عقبة كبيرة في دقة الرادار مقابل إطار الدقة، حيث ترتد الإشارات عن الأسطح وتصل عبر مسارات متعددة، مما يتسبب في حدوث تداخل وأهداف شبحية. يمكن لهذه الظاهرة أن تؤدي إلى انخفاض الدقة عن طريق إنشاء فواصل زائفة وتقليل الدقة عن طريق تغيير مواقع الكائنات الملموسة. تساعد إستراتيجيات التخفيف المتقدمة، بما في ذلك تشكيل الشعاع التكيفي ورفض الفوضى المستندة إلى التعلم الآلي، في مواجهة هذه التأثيرات. على سبيل المثال، في الأماكن المغلقة، يمكن للانعكاس متعدد المسارات أن يضاعف متطلبات الدقة الفعالة بنسبة تصل إلى 50%، لكن الأنظمة الحديثة مثل تلك التي تستخدم mmWave تتضمن تنوع الاستقطاب لتصفية الأصداء غير المرغوب فيها. إن فهم ومعالجة المسارات المتعددة يضمن أن الرادارات تقدم بيانات دقيقة وعالية الدقة، وهي ضرورية للتطبيقات في المدن الذكية والملاحة المستقلة. وبشكل عام، فإن موازنة هذه العناصر تؤدي إلى رادارات ليست قادرة من الناحية النظرية فحسب، بل يمكن الاعتماد عليها عمليًا أيضًا.