










لماذا يُعدّ تقسيم المشهد مهمًا في أنظمة الاستشعار والإدراك؟
يُعدّ تقسيم المشهد أحد المصطلحات الهندسية التي تبدو مجردة حتى يبدأ النظام في إغفال جوهرها. ففي الرادار، والرؤية الحاسوبية، والروبوتات، وغيرها من التطبيقات التي تعتمد على الإدراك، لا تكمن المشكلة الحقيقية في مجرد اكتشاف وجود شيء ما، بل في فصل منطقة ذات دلالة عن أخرى ليتمكن النظام من تفسير ما هو متحرك، وما هو ثابت، وما يستحق الانتباه. بالنسبة للمهندسين وفرق تطوير المنتجات، يؤثر هذا التمييز على الأداء، والإنذارات الكاذبة، والتتبع اللاحق، وفي نهاية المطاف، على مدى فائدة المنتج في الميدان.
لهذا السبب، يُعدّ تقسيم المشهد محورًا أساسيًا في العديد من قرارات التصميم. فهو يُساعد على تحويل تدفق البيانات المُشوّش إلى رؤية مُنظّمة للبيئة. إذا كان التقسيم خشنًا جدًا، فإنّ العديد من الكائنات تتداخل معًا. وإذا كان مُفرطًا في التقسيم، فإنّ أجزاءً من المشهد تُقطّع إلى أجزاء غير مفهومة. في كلتا الحالتين، قد تُضعف النتيجة قدرة الكشف، وتُقلّل من فعالية تتبّع الأهداف المتعددة ، وتجعل النظام أقل موثوقية.
المشكلة العملية: نادراً ما تكون البيانات الأولية قابلة للقراءة.
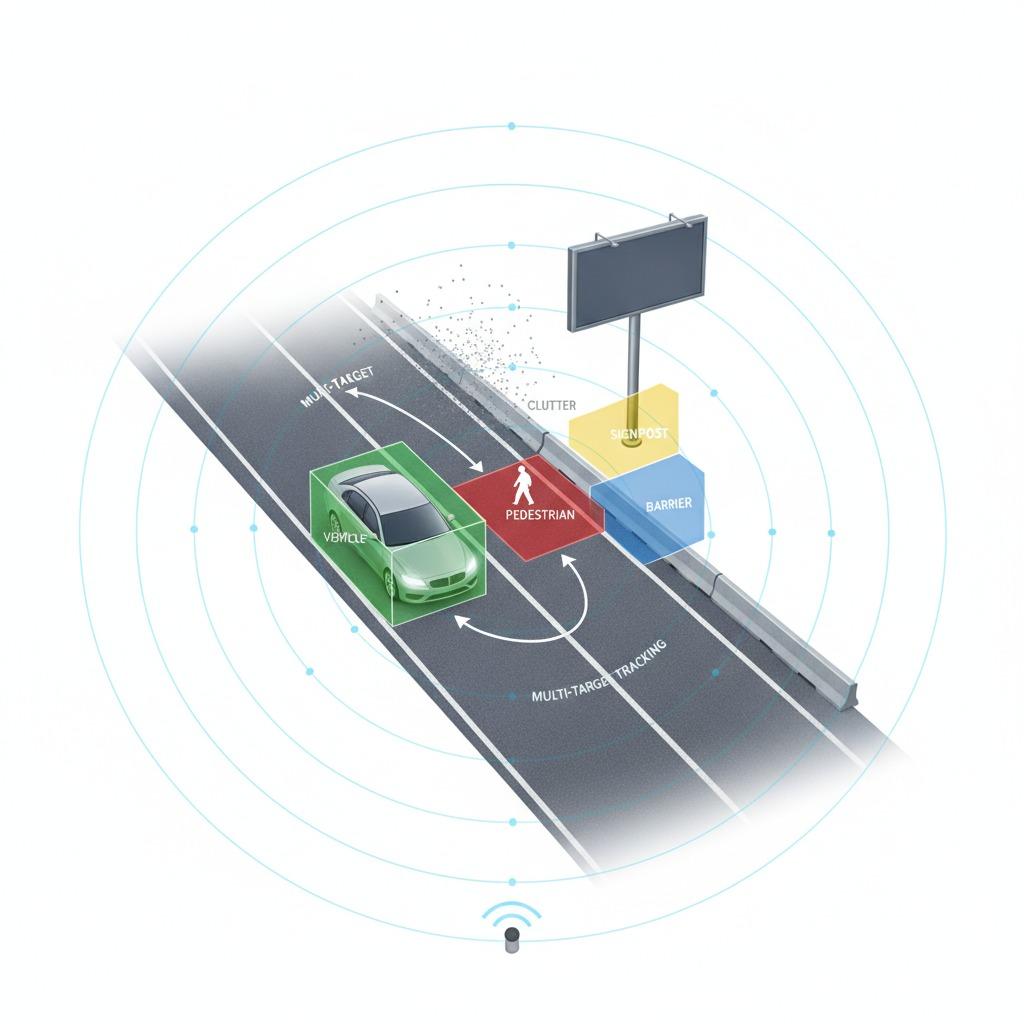
لا تفشل معظم أنظمة الاستشعار لعدم جمعها أي بيانات، بل لكثرة البيانات غير المنظمة التي تجمعها. تتداخل الانعكاسات، وتحجب الأجسام المتحركة بعضها بعضًا، وتُحدث هياكل الخلفية تشويشًا مستمرًا. في تطبيقات الرادار، على سبيل المثال، قد تتواجد مركبة، وشخص ما، وعلامة إرشادية، وحاجز جانبي في نفس الإطار. وبدون استراتيجية تجزئة فعّالة، يرى النظام مجالًا مزدحمًا من الانعكاسات بدلًا من عناصر المشهد المتميزة.
هنا يصبح قمع التشويش أكثر من مجرد ميزة لمعالجة الإشارات، فهو جزء لا يتجزأ من استراتيجية التجزئة نفسها. فكلما كان الفصل بين الأهداف المهمة والضوضاء الخلفية أوضح، كان النظام أكثر قدرة على تحديد معنى المشهد. غالبًا ما يركز المشترون على نطاق الكشف أولًا، ولكن في كثير من التطبيقات، تكمن المشكلة الأكبر في قابلية التفسير. قد لا يُحقق النظام الذي "يرى" من مسافة بعيدة ولكنه لا يستطيع فصل مكونات المشهد بوضوح الأداء المطلوب في الاستخدام الفعلي.
ما هي عملية التجزئة التي تساعد النظام على اتخاذ القرار؟
على المستوى الأساسي، يساعد تجزئة المشهد في الإجابة على أربعة أسئلة: أين تقع حدود الأجسام؟ ما هي الإشارات التي تنتمي إلى بعضها؟ ما هي الخلفية؟ وما الذي تغير؟ قد تبدو هذه الأسئلة بسيطة، لكنها تُشغّل العديد من الوظائف المتقدمة. على سبيل المثال، قد يستخدم نظام رؤية الآلة التجزئة لعزل العيوب على شبكة متحركة. وقد يستخدمها نظام الرادار لتمييز المركبات في المسارات المتجاورة. وقد يعتمد عليها الروبوت المتحرك لفصل حركة الأرضية والجدار والعوائق والبشر.
إحدى الطرق المفيدة للتفكير في المفاضلة التصميمية هي كالتالي: كلما كانت عملية التجزئة أفضل، قلّ الجهد المطلوب في المراحل اللاحقة. يتحسن التتبع والتصنيف وتوقع المسار عندما يكون المشهد الأولي مقسمًا إلى مناطق منطقية. وينطبق هذا بشكل خاص على البيئات التي تعاني من الحجب أو الحركة المختلطة أو تغيرات الخلفية السريعة.
العوامل التقنية الرئيسية التي تؤثر على جودة التجزئة
الدقة المكانية
تُحدد الدقة المكانية الحد الأدنى لكمية التفاصيل التي يمكن للنظام فصلها مكانيًا. فإذا كانت الدقة محدودة، قد يندمج جسمان متجاوران في منطقة واحدة قبل أن تتاح للبرنامج فرصة تحليلهما. صحيح أن الدقة العالية تُحسّن تجزئة المشهد، إلا أنها تزيد أيضًا من عبء المعالجة، وقد تُضيف تحديات جديدة في المعايرة ومعالجة البيانات. لذا، ينبغي على المهندسين التعامل مع الدقة كخيار على مستوى النظام، لا كمجرد رقم تسويقي.
بصمة دوبلر الدقيقة
في الأنظمة القائمة على الرادار، يمكن أن توفر بصمة دوبلر الدقيقة أدلة قيّمة حول أنماط الحركة داخل المشهد. فالحركات الصغيرة، مثل حركة الأطراف أو دوران المكونات، تساعد في تمييز جسم عن آخر حتى عندما تتداخل في المدى أو الزاوية. مع ذلك، فإن بصمة دوبلر الدقيقة ليست سحرية، بل تعمل بكفاءة عالية عندما تعالج بقية مراحل المعالجة الضوضاء والتداخل وحدود أخذ العينات بشكل كافٍ للحفاظ على التفاصيل.
إخفاء الفوضى
يمنع نظام كبح التشويش الجيد ظهور عناصر ثابتة أو غير ذات صلة تُطغى على خريطة المشهد. ولكن يجب الحذر هنا: فالكبح المفرط للتشويش قد يُزيل عناصر حقيقية قليلة الحركة أو يُخفي تغييرات طفيفة في الخلفية. تميل أفضل الأنظمة إلى استخدام أساليب تكيفية، خاصةً في البيئات الخارجية حيث تتغير الإضاءة وظروف السطح والهياكل العاكسة بمرور الوقت.
تتبع الأهداف المتعددة
غالبًا ما يُقيّم التجزئة بناءً على ما تُتيحه في المراحل اللاحقة. في تتبع الأهداف المتعددة ، يُساعد الفصل الواضح على الحفاظ على هوية الكائن عبر الإطارات. أما التجزئة الضعيفة فتُؤدي إلى دمج الكتل، ومسارات مُتقطعة، وإعادة اكتساب خاطئة. وعند حدوث ذلك، يقضي نظام التتبع وقتًا أطول في إصلاح المشهد بدلًا من فهمه.
كيف ينبغي للمشترين مقارنة أساليب تجزئة السوق؟
لا توجد طريقة واحدة مثالية لجميع التطبيقات. يعتمد الاختيار الأمثل على مدى تعقيد المشهد، وحجم الأجسام، وخصائص الحركة، وما إذا كان النظام يجب أن يعمل في الوقت الفعلي. في البيئات البسيطة، قد يكون النهج القائم على القواعد أو العتبات كافيًا. أما في المشاهد الكثيفة أو الديناميكية، فعادةً ما تكون الطرق الأكثر تكيفًا تستحق الجهد الحسابي الإضافي.
عند مقارنة الخيارات، اطرح أسئلة عملية. هل تستطيع الطريقة التعامل مع الأجسام المتداخلة؟ هل تحافظ على استقرارها عند تغير الظروف البيئية؟ ماذا يحدث عندما يتباطأ الهدف أو يتوقف؟ هل يحافظ النظام على الأجسام الصغيرة، أم أنه يركز فقط على تحقيق العوائد الأكبر؟ هذه ليست مخاوف نظرية، بل هي المشكلات التي تظهر أثناء التجارب الأولية والتحقق الميداني.
أخطاء شائعة تؤدي إلى ضعف التجزئة
من الأخطاء الشائعة اعتبار تجزئة الصور خطوةً لاحقةً للمعالجة. فبحلول الوقت الذي تصبح فيه البيانات مشوشةً ومضغوطةً، تُفقد العديد من الفروقات المهمة. خطأ آخر هو افتراض أن مجموعة بيانات واحدة تُثبت المتانة. فالمشهد الذي يبدو واضحًا في منطقة اختبار مضبوطة قد يتصرف بشكل مختلف تمامًا في المطر، أو الوهج، أو الاهتزاز، أو البيئة العاكسة، أو الازدحام.
ثمة مشكلة ثالثة تتمثل في ضبط النظام لنوع هدف واحد ثم توقع تعميمه. قد يكون أداء ملف تعريف التجزئة الذي يعمل بكفاءة مع الأجسام المتحركة الكبيرة ضعيفًا عند دخول أهداف أصغر أو أبطأ إلى نفس المساحة. لذا، ينبغي على المشترين الحذر من العروض التوضيحية التي تبدو مصقولة ولكنها لا تكشف عن كيفية عمل النظام في ظل ظروف مختلطة.
ما الذي يجب السؤال عنه قبل الشراء أو الدمج
قبل اختيار منصة أو خوارزمية، اطلب أدلة على كيفية تعاملها مع الحالات الحدية، وليس فقط الحالات المثالية. اطلب أمثلة توضح تداخل الأهداف، وتداخل الخلفية، والمشاهد منخفضة التباين. إذا كان التطبيق يعتمد على التتبع، فاسأل عن كيفية دعم التجزئة لاستمرارية الكائنات عبر الإطارات. إذا كانت حالة الاستخدام تعتمد على تفاصيل الحركة، فاسأل عن كيفية حفاظ النظام على السمات المميزة دون تضخيم التشويش.
كما يساعد ذلك في تحديد النجاح من الناحية العملية. فأسلوب التجزئة الأمثل ليس بالضرورة هو الأسلوب الذي يحمل أحدث التصنيفات، بل هو الأسلوب الذي يُحسّن جودة القرارات في سير العمل الفعلي، سواءً كان ذلك يعني تقليل الإنذارات الكاذبة، أو تحسين فصل العناصر، أو زيادة موثوقية التتبع اللاحق.
خلاصة سريعة للمشتري
يُعدّ تقسيم المشهد ذا أهمية بالغة عندما يتعين على نظام الاستشعار تفسير بيئة مزدحمة أو متغيرة أو محجوبة جزئيًا. يُحسّن التقسيم القوي من وضوح الرؤية، ويدعم تتبعًا أفضل، ويجعل النظام بأكمله أكثر موثوقية. أما التقسيم الضعيف فيؤدي إلى عكس ذلك، حتى لو كان المستشعر الأمامي نفسه يبدو واعدًا نظريًا.
إذا كنت بصدد تقييم منصة جديدة، فركز بشكل أقل على المواصفات الرئيسية وحدها، وأكثر على كيفية فصل النظام للأشياء في ظروف التشغيل الفعلية. عندها فقط يتضح الفرق بين نموذج أولي واعد ومنتج قابل للاستخدام.
الخطوة التالية لفرق الهندسة
ابدأ بالمشهد، لا بقائمة الميزات. حدد مصادر التشويش والتداخل والحركة المحتملة في تطبيقك، ثم اختبر ما إذا كان أسلوب التجزئة المقترح قادرًا على فصل هذه الحالات بوضوح. عادةً ما تكون التجربة الدقيقة في بيئات نموذجية أكثر فائدة من ورقة مواصفات مطولة، وبصراحة، فهي توفر الوقت لاحقًا.