


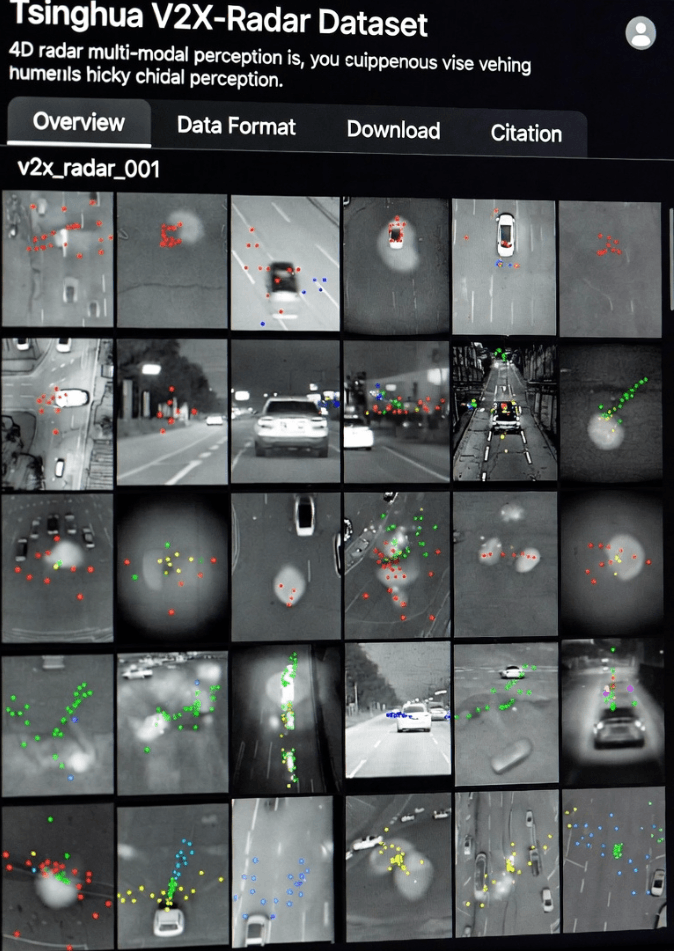
تتطور القيادة الذاتية بوتيرة متسارعة، إلا أن الإدراك البيئي لا يزال يمثل تحديًا بالغ الأهمية. غالبًا ما تكون حلول المركبات الفردية محدودة بسبب نقاط ضعف أجهزة الاستشعار ونطاق الكشف، مما يجعل من الصعب التعامل مع حركة المرور الكثيفة، أو السيناريوهات غير العادية، أو الظروف الجوية القاسية. وللتغلب على هذه القيود، أصدر معهد المركبات والتنقل بجامعة تسينغهوا ، بالتعاون مع عدد من الجهات المتعاونة، مجموعة بيانات رادار V2X في مؤتمر NeurIPS 2025. وهي أول مجموعة بيانات واسعة النطاق تستخدم رادارًا رباعي الأبعاد لإدراك المركبات لكل شيء (V2X) ، مما يتيح دمج أجهزة الاستشعار متعددة الوسائط، ويُظهر مزايا كبيرة في البيئات المعقدة ( الصفحة الرسمية لرادار Tsinghua V2X ).
تمثل مجموعة البيانات تحولاً من الإدراك التقليدي للمركبة الواحدة إلى الإدراك التعاوني. في حين تعتمد معظم المركبات ذاتية القيادة على أجهزة استشعار مثل الليدار والكاميرات ورادار الموجات المليمترية ، إلا أن لكل نوع من أجهزة الاستشعار نقاط ضعف جوهرية. يوفر الليدار بنية ثلاثية الأبعاد دقيقة، لكن أداءه يتدهور في المطر أو الضباب أو الثلج. تلتقط الكاميرات معلومات دلالية غنية، لكنها تعتمد على الإضاءة، وغالبًا ما تكون أقل فعالية في الليل أو في ظل الإضاءة الخلفية القوية. يتيح دمج البيانات من أجهزة الاستشعار المثبتة على المركبات مع البنية التحتية على جانب الطريق فهمًا أكثر شمولاً وديناميكية للبيئة، مما يُمكّن المركبات من إدراك مناطق لا يمكنها اكتشافها بشكل مستقل ( معاملات معهد مهندسي الكهرباء والإلكترونيات لأنظمة النقل الذكية ).
تفتقر مجموعات بيانات V2X الحالية، مثل OpenV2V و DAIR-V2X ، عمومًا إلى بيانات الرادار رباعي الأبعاد، مما يحد من البحث في مجال الدمج متعدد الوسائط. تعالج مجموعة بيانات V2X-Radar هذه الفجوة من خلال دمج الرادار رباعي الأبعاد مع تقنية LiDAR وكاميرات متعددة المشاهد، مما يسمح للباحثين باستكشاف الدمج المكاني-الزماني العميق لتحقيق الإدراك التعاوني. يُحسّن هذا النهج الكشف في السيناريوهات طويلة المدى، مثل المشاة أو المركبات المزدحمة جزئيًا عند التقاطعات المعقدة.
الميزات الرئيسية لرادار V2X
دمج أجهزة الاستشعار متعددة الوسائط
تشمل وحدات المركبات والطرق في رادار V2X تقنية LiDAR، ورادارًا رباعي الأبعاد، وكاميرات متعددة الرؤية ، مما يُشكّل قدرات إدراك متكاملة. يُساهم كل مستشعر بنقاط قوة فريدة:
تنتج تقنية LiDAR سحبًا كثيفة من النقاط، مما يؤدي إلى التقاط هندسة الكائنات بدقة تصل إلى مستوى السنتيمتر.
يعمل رادار 4D بتردد 77/79 جيجاهرتز، ويخترق المطر والضباب والثلوج، ويوفر معلومات السرعة من السحب النقطية المتفرقة ( تقنية رادار Linpowave 4D ).
توفر الكاميرات صور RGB عالية الدقة، مما يضيف سياقًا دلاليًا ويمكّن من التعرف على إشارات المرور وعلامات الحارات وإيماءات المشاة.
تُظهر التجارب أن أداء الليدار يتفوق بشكل طفيف على الرادار في الطقس الصافي، إلا أن الرادار رباعي الأبعاد يحافظ على استقرار أفضل في الظروف المعاكسة، مع زيادة في mAP بنسبة 1-2%. تؤكد هذه النتائج أهمية دمج المستشعرات متعددة الوسائط في القيادة الذاتية في العالم الواقعي.
تغطية متنوعة للسيناريوهات
جُمعت البيانات على مدى تسعة أشهر في بيئات متعددة، بما في ذلك حرم الجامعات، والطرق العامة، ومواقع الاختبار المُراقبة. تغطي مجموعة البيانات ما يلي:
حالة الطقس: صافٍ، ممطر، ضبابي، ثلجي
أوقات اليوم: النهار، الغسق، الليل
التقاطعات المعقدة: الشوارع المتقاطعة، والتقاطعات على شكل حرف T، والمناطق المغلقة في الحرم الجامعي
تلتقط كاميرات الطرق المشاة أو راكبي الدراجات المختبئين عن أجهزة LiDAR المثبتة على المركبات، مما يوفر بيانات قيّمة لتدريب السيناريوهات طويلة المدى ( مجموعة بيانات MIT CAV ). تُعد هذه السيناريوهات بالغة الأهمية لتطوير خوارزميات قيادة ذاتية قوية قادرة على التعامل مع الحالات الطارئة بفعالية.
دعم المهام المتعددة
ينقسم رادار V2X إلى ثلاث مجموعات فرعية لدعم اتجاهات بحثية مختلفة:
V2X-Radar-C: الكشف التعاوني عن الكائنات ثلاثية الأبعاد من خلال الجمع بين بيانات السيارة وبيانات جانب الطريق
رادار V2X-I: الإدراك على جانب الطريق فقط
V2X-Radar-V: الإدراك المحلي للمركبة
تحقق النماذج التعاونية، مثل V2X-ViT، نسبة 53.61% من mAP عند دمج LiDAR مع الرادار رباعي الأبعاد، متفوقةً بشكل ملحوظ على نماذج LiDAR أحادية النمط (47.23%). يُظهر هذا أن الدمج متعدد الأنماط يُحسّن من متانة الإدراك، خاصةً في البيئات المعقدة أو المُغلقة.
مزامنة المستشعر
المحاذاة الدقيقة لأجهزة الاستشعار ضرورية للإدراك التعاوني. يستخدم رادار V2X توقيت GPS/IMU وتسجيل سحابة النقاط القائمة على الميزات.
مزامنة الوقت: تعمل إشارات GNSS وصناديق الوقت على تحقيق محاذاة على مستوى النانو ثانية بين المركبات ووحدات الطريق.
المحاذاة المكانية: يتم معايرة LiDAR والكاميرات باستخدام أنماط رقعة الشطرنج؛ ويستخدم LiDAR والرادار رباعي الأبعاد عاكسات الزاوية، لتحقيق دقة على مستوى السنتيمتر.
ويضمن هذا اندماجًا موثوقًا به بين أجهزة الاستشعار المتعددة حتى في سيناريوهات المرور الديناميكية، مما يوفر أساسًا قويًا للبحث في إدراك V2X .
التفاصيل الفنية
مقياس البيانات والتعليق التوضيحي
تحتوي مجموعة البيانات على 540,000 إطارًا متعدد الوسائط :
20,000 إطار ليدار
40,000 إطار كاميرا
20,000 إطار رادار رباعي الأبعاد
يتضمن 350,000 مربع حدودي ثلاثي الأبعاد مُعلّق ، يُغطي السيارات والشاحنات والحافلات وراكبي الدراجات والمشاة. يُنفَّذ الشرح باستخدام أدوات شبه آلية، مع حد أدنى من التصحيح اليدوي، مما يضمن دقة عالية لتطوير الخوارزميات.
التحقق من صحة الخوارزمية
يكشف رادار V2X عن تحديين تقنيين رئيسيين:
تأخير الاتصال: يؤدي تأخير ثابت لمدة 100 مللي ثانية إلى تقليل mAP بنسبة 13.3% -20.49% للطرق مثل F-Cooper، مما يسلط الضوء على أهمية الشبكات ذات زمن الوصول المنخفض.
الاندماج متعدد الوسائط: يؤدي الجمع بين تقنية LiDAR والرادار رباعي الأبعاد إلى تحسين mAP بنسبة 53.61% في الطقس السيئ، مما يوضح فوائد التكامل بين الوسائط.
تعمل خوارزميات التعويض المكاني الزمني على تقليل الأخطاء الزمنية بشكل أكبر، مما يعزز قوة نماذج الإدراك التعاوني.
التطبيقات والتوجهات المستقبلية
يوفر رادار V2X قيمة في العديد من المجالات:
اختبار الخوارزمية: يدعم البحث في دمج الرادار LiDAR و 4D والكشف التعاوني
معايير الصناعة: وضع إرشادات للمزامنة والتعليق متعدد الوسائط
الإمكانات التجارية: يقلل اختراق الرادار رباعي الأبعاد من تكاليف النشر في المدن الذكية والموانئ وتطبيقات الخدمات اللوجستية
وتتضمن الخطط المستقبلية دمج تتبع الكائنات المتعددة، والتنبؤ بالمسار، واختبارات شبكة C-V2X في العالم الحقيقي، مما يسرع الانتقال من البحث المختبري إلى النشر في العالم الحقيقي.
التعليمات
س1: ما هو الرادار رباعي الأبعاد؟
A1: يوفر الرادار رباعي الأبعاد معلومات المسافة والزاوية والسرعة في الوقت الفعلي، مما يتيح اكتشاف الأجسام المتحركة في بيئات معقدة ( مرجع MDPI ).
س2: ما هي المهام التي يمكن أن يدعمها V2X-Radar؟
أ2: الكشف التعاوني، والإدراك على جانب الطريق فقط، والإدراك المحلي للمركبة، والاندماج متعدد الوسائط، وتتبع العديد من الكائنات.
س3: كيف يمكن للباحثين الوصول إلى مجموعة البيانات؟
ج3: يتم تقديم الطلبات عبر جامعة تسينغهوا ( الصفحة الرسمية لـ V2X-Radar ).
س4: لماذا يعد الاندماج المتعدد الوسائط مهمًا؟
ج4: الجمع بين تقنية LiDAR والرادار رباعي الأبعاد والكاميرات يقلل من النقاط العمياء، ويحسن الأداء في الطقس السيئ، ويلتقط الأشياء المحجوبة.
خاتمة
تُعدّ مجموعة بيانات رادار V2X إنجازًا بارزًا في مجال إدراك القيادة الذاتية. يُسهم دمج الرادار رباعي الأبعاد مع الليدار والكاميرات في معالجة المشكلات طويلة المدى التي لا تستطيع أنظمة المركبات الفردية حلها. ومع تقدم المركبات ذاتية القيادة نحو أتمتة المستوى الرابع/الخامس، قد يُعيد رادار V2X تشكيل مشهد تكنولوجيا الإدراك، ويفتح آفاقًا جديدة للنقل الذكي.
لمعرفة المزيد عن رادار الموجات المليمترية رباعي الأبعاد في إدراك V2X، راجع منتجات رادار Linpowave رباعي الأبعاد .