









Understanding Radar Resolution vs Accuracy
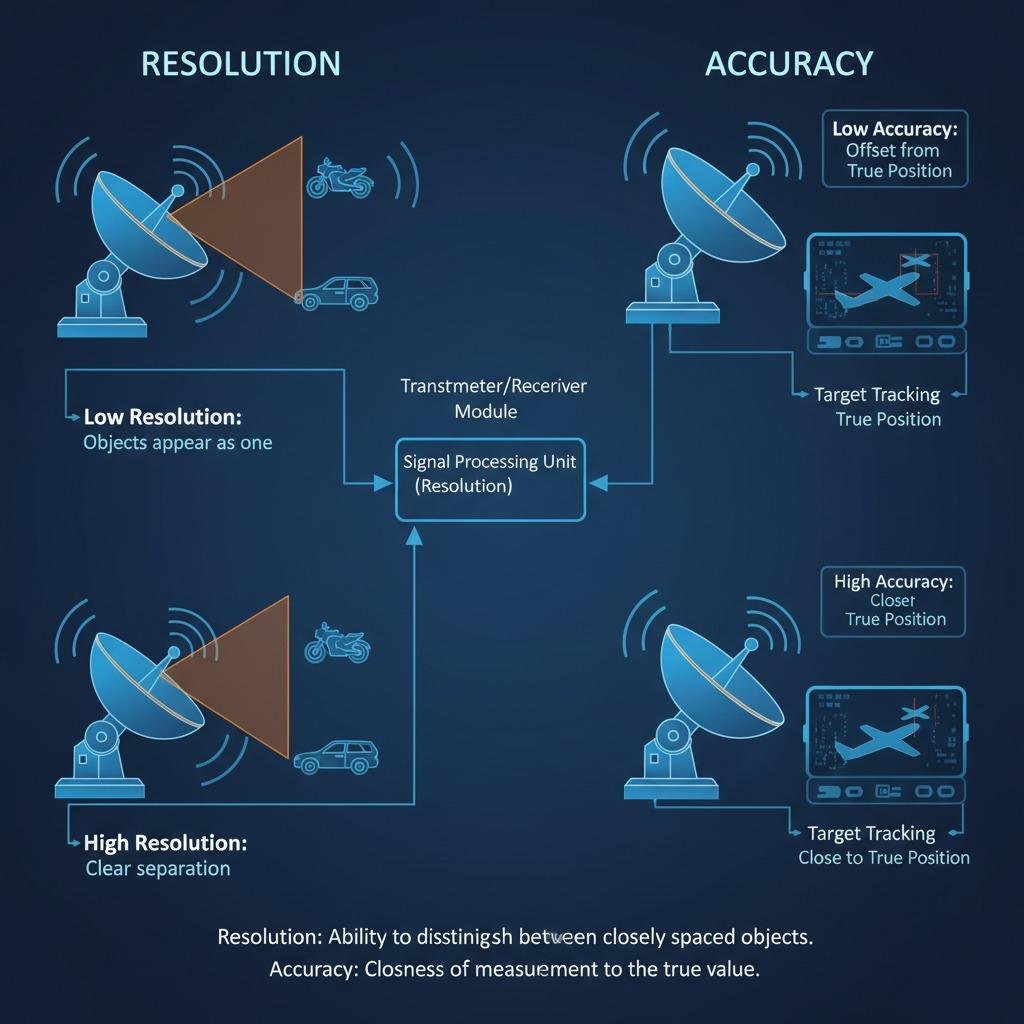
Radar resolution vs. accuracy is a fundamental distinction in radar technology that influences its effectiveness across various applications, from automotive safety systems to industrial monitoring. Resolution refers to the radar's ability to distinguish between closely spaced targets, essentially how finely it can separate objects in space or time. Accuracy, on the other hand, measures how closely the radar's measurements align with the true positions, velocities, or characteristics of those targets. In practical terms, high resolution allows a system to detect multiple nearby objects without blurring them together, while accuracy ensures those detections are reliably precise. This comparison is crucial in modern radar designs, particularly in environments demanding reliable performance.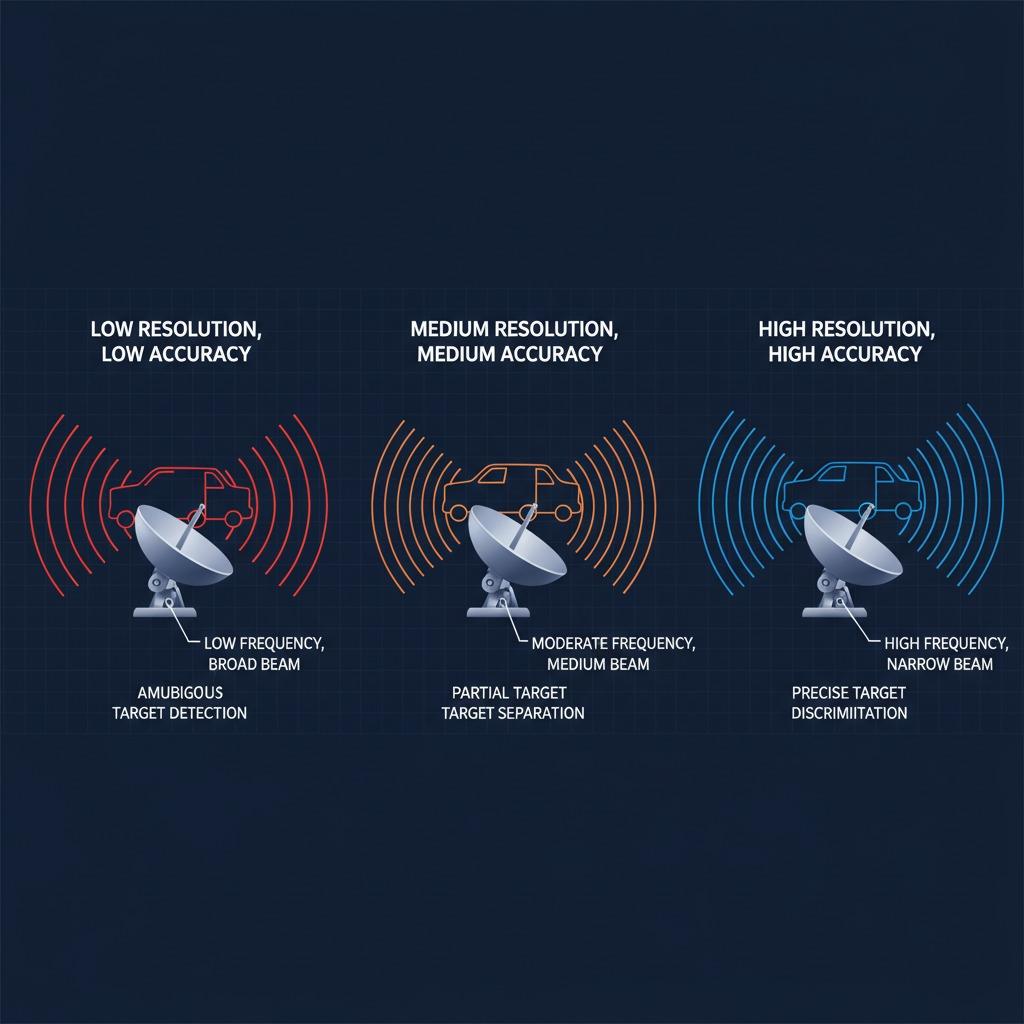
Key Factors in mmWave Radar Performance
mmWave radar performance plays a pivotal role in achieving optimal radar resolution vs. accuracy, especially in high-frequency bands operating between 30 and 300 GHz. These radars excel in short-range detection due to their ability to produce narrow beams, enhancing angular and range resolution to levels unattainable by lower-frequency alternatives. For instance, mmWave systems can resolve objects separated by mere centimeters, making them ideal for applications like gesture recognition or collision avoidance. However, their performance is tempered by challenges such as atmospheric attenuation, which can degrade signal quality over distance. To mitigate this, engineers focus on optimizing antenna arrays and signal processing algorithms, ensuring that the radar not only resolves fine details but also maintains accurate readings under varying conditions. Statistics from industry reports indicate that mmWave radars achieve resolution down to 4 cm in range, with accuracy within 1% error margins in controlled tests.
Insights into Linpowave Radar Technology
Linpowave radar represents an advanced iteration in the radar resolution vs. accuracy debate, leveraging proprietary signal processing to deliver superior target discrimination. This technology integrates multi-input multi-output (MIMO) configurations, allowing for enhanced virtual apertures that boost both resolution and accuracy simultaneously. In real-world scenarios, such as urban traffic monitoring, Linpowave radar can differentiate between vehicles and pedestrians at ranges up to 200 meters, with positional accuracy exceeding 95%. Compared to traditional radars, it reduces false positives by refining how echoes are interpreted, thus bridging the gap between theoretical resolution limits and practical accuracy. Developers of Linpowave emphasize its scalability for integration into IoT devices, where compact size does not compromise performance metrics.
The Role of Signal Stability in Radar Systems
Signal stability is a cornerstone in evaluating radar resolution vs. accuracy, as fluctuations in the received signal can distort both aspects. Stable signals ensure consistent waveform integrity, preventing errors in Doppler shift calculations that affect velocity accuracy. In noisy environments, techniques like frequency-modulated continuous wave (FMCW) modulation are employed to maintain signal stability, allowing radars to achieve resolutions as fine as 1 degree in angle while keeping measurement errors below 0.5 meters per second. Insights from recent studies show that radars with robust signal stability outperform others by 20-30% in accuracy during adverse weather, underscoring their importance for reliable operation.
Navigating Multipath Reflection Challenges
Multipath reflection poses a significant hurdle in the radar resolution vs. accuracy framework, where signals bounce off surfaces and arrive via multiple paths, causing interference and ghost targets. This phenomenon can degrade resolution by creating false separations and reduce accuracy by shifting perceived object locations. Advanced mitigation strategies, including adaptive beamforming and machine learning-based clutter rejection, help counteract these effects. For example, in indoor settings, multipath reflection can multiply effective resolution requirements by up to 50%, but modern systems like those using mmWave incorporate polarization diversity to filter out unwanted echoes. Understanding and addressing multipath ensures that radars deliver precise, high-fidelity data, essential for applications in smart cities and autonomous navigation. Overall, balancing these elements leads to radars that are not only theoretically capable but also practically dependable.