









Comprensión de la resolución del radar frente a la precisión
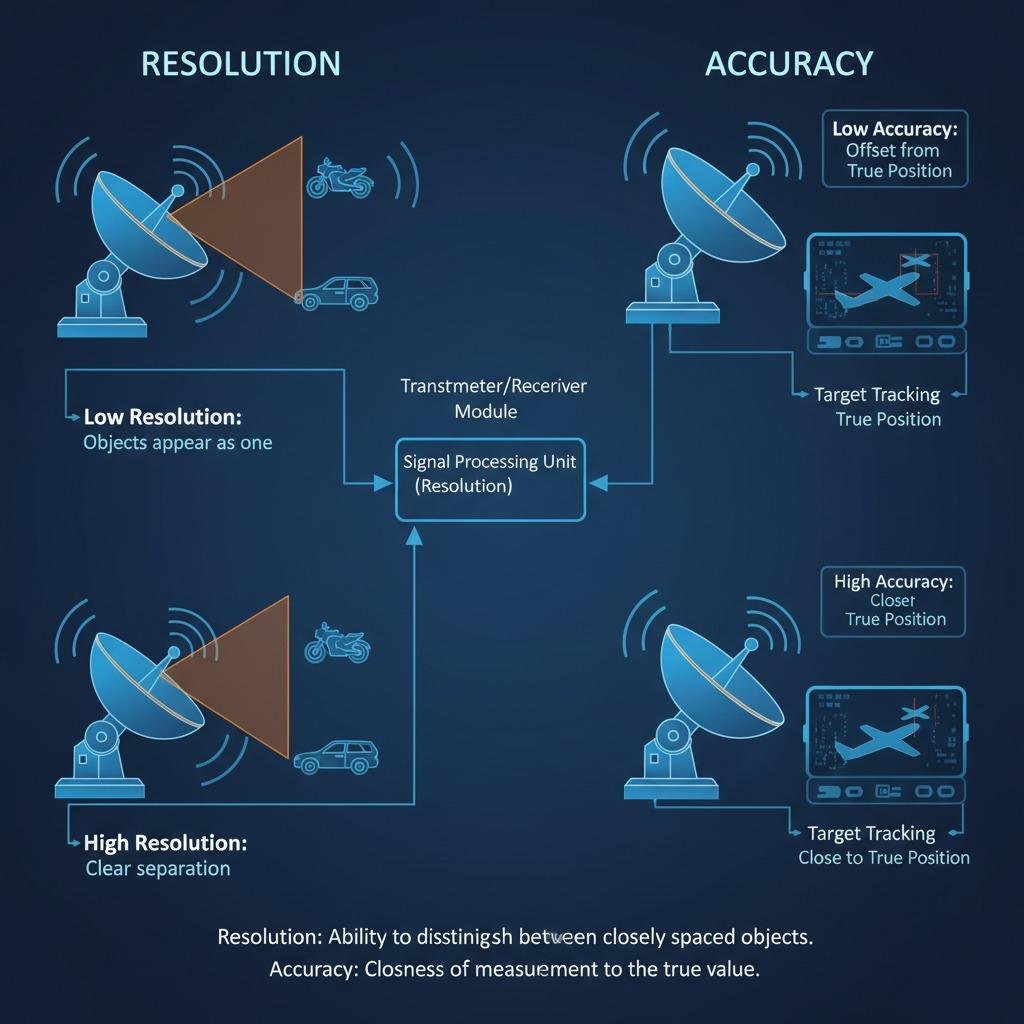
La resolución del radar versus la precisión es una distinción fundamental en la tecnología de radar que influye en su efectividad en diversas aplicaciones, desde sistemas de seguridad automotrices hasta monitoreo industrial. La resolución se refiere a la capacidad del radar para distinguir entre objetivos estrechamente espaciados, esencialmente con qué precisión puede separar objetos en el espacio o el tiempo. La precisión, por otro lado, mide qué tan cerca se alinean las mediciones del radar con las verdaderas posiciones, velocidades o características de esos objetivos. En términos prácticos, la alta resolución permite que un sistema detecte múltiples objetos cercanos sin desenfocarlos, mientras que la precisión garantiza que esas detecciones sean confiablemente precisas. Esta comparación es crucial en los diseños de radares modernos, particularmente en entornos que exigen un rendimiento confiable.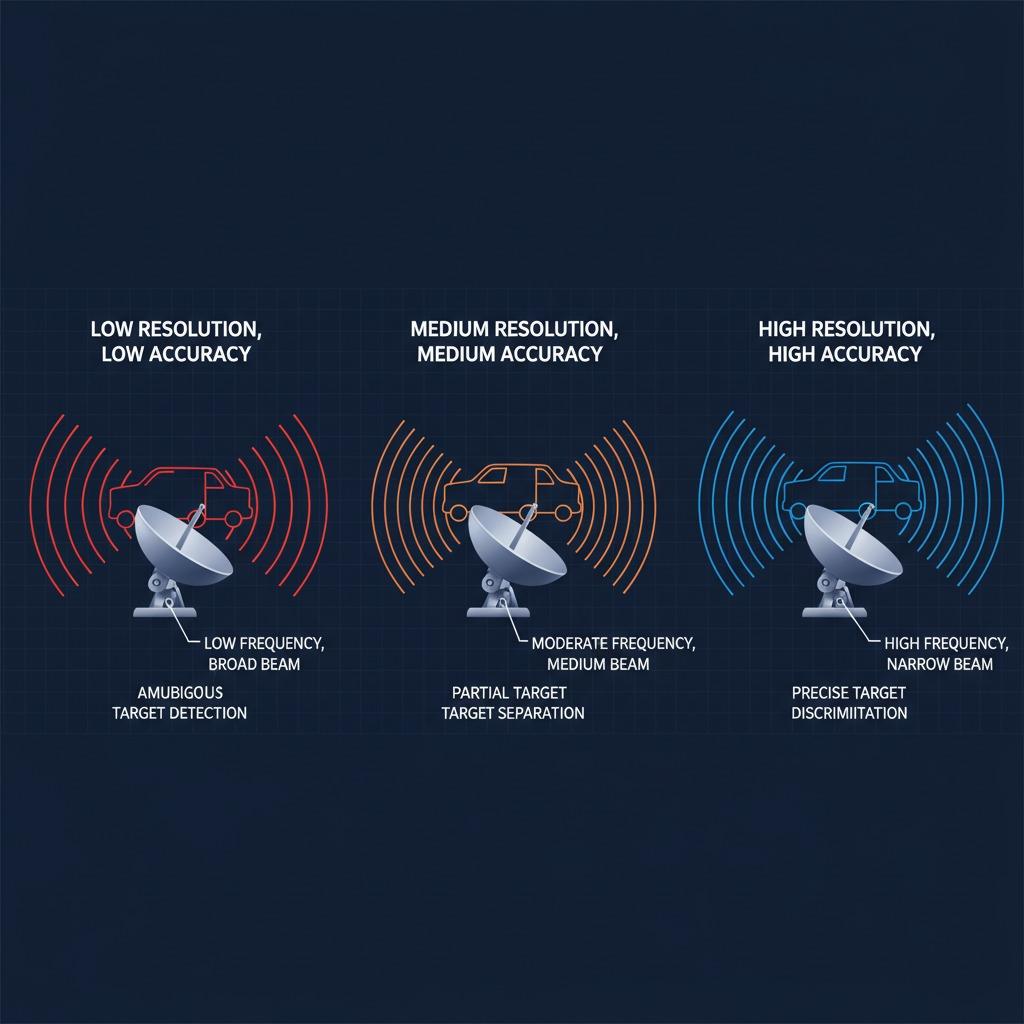
Factores clave en el rendimiento del radar mmWave
El rendimiento del
radar mmWave juega un papel fundamental para lograr una resolución óptima del radar frente a la precisión, especialmente en bandas de alta frecuencia que operan entre 30 y 300 GHz. Estos radares destacan en la detección de corto alcance debido a su capacidad de producir haces estrechos, mejorando la resolución angular y de alcance a niveles inalcanzables con alternativas de menor frecuencia. Por ejemplo, los sistemas mmWave pueden resolver objetos separados por apenas centímetros, lo que los hace ideales para aplicaciones como el reconocimiento de gestos o la prevención de colisiones. Sin embargo, su rendimiento se ve atenuado por desafíos como la atenuación atmosférica, que puede degradar la calidad de la señal a distancia. Para mitigar esto, los ingenieros se centran en optimizar los conjuntos de antenas y los algoritmos de procesamiento de señales, asegurando que el radar no solo resuelva detalles finos sino que también mantenga lecturas precisas en diferentes condiciones. Las estadísticas de informes de la industria indican que los radares mmWave alcanzan una resolución de hasta 4 cm de alcance, con una precisión dentro de márgenes de error del 1% en pruebas controladas.
Información sobre la tecnología de radar Linpowave
El radar Linpowave representa una iteración avanzada en el debate entre la resolución y la precisión del radar, aprovechando el procesamiento de señales patentado para ofrecer una discriminación de objetivos superior. Esta tecnología integra configuraciones de múltiples entradas y múltiples salidas (MIMO), lo que permite aperturas virtuales mejoradas que aumentan la resolución y la precisión simultáneamente. En escenarios del mundo real, como el monitoreo del tráfico urbano, el radar Linpowave puede diferenciar entre vehículos y peatones a distancias de hasta 200 metros, con una precisión posicional superior al 95%. En comparación con los radares tradicionales, reduce los falsos positivos al refinar la forma en que se interpretan los ecos, cerrando así la brecha entre los límites de resolución teóricos y la precisión práctica. Los desarrolladores de Linpowave enfatizan su escalabilidad para la integración en dispositivos IoT, donde el tamaño compacto no compromete las métricas de rendimiento.
El papel de la estabilidad de la señal en los sistemas de radar
La estabilidad de la señal es una piedra angular en la evaluación de la resolución del radar versus la precisión, ya que las fluctuaciones en la señal recibida pueden distorsionar ambos aspectos. Las señales estables garantizan una integridad constante de la forma de onda, evitando errores en los cálculos del desplazamiento Doppler que afectan la precisión de la velocidad. En entornos ruidosos, se emplean técnicas como la modulación de onda continua modulada en frecuencia (FMCW) para mantener la estabilidad de la señal, lo que permite a los radares alcanzar resoluciones tan finas como 1 grado en ángulo mientras se mantienen los errores de medición por debajo de 0,5 metros por segundo. Los conocimientos de estudios recientes muestran que los radares con una sólida estabilidad de señal superan a otros en un 20-30 % en precisión durante condiciones climáticas adversas, lo que subraya su importancia para un funcionamiento confiable.
Afrontando los desafíos de la reflexión de rutas múltiples
La reflexión de trayectorias múltiples plantea un obstáculo importante en el marco de resolución versus precisión del radar, donde las señales rebotan en las superficies y llegan a través de múltiples trayectorias, causando interferencias y objetivos fantasma. Este fenómeno puede degradar la resolución al crear separaciones falsas y reducir la precisión al cambiar las ubicaciones de los objetos percibidos. Las estrategias de mitigación avanzadas, incluida la formación de haces adaptativa y el rechazo del desorden basado en el aprendizaje automático, ayudan a contrarrestar estos efectos. Por ejemplo, en entornos interiores, la reflexión multitrayectoria puede multiplicar los requisitos de resolución efectiva hasta en un 50%, pero los sistemas modernos como los que utilizan mmWave incorporan diversidad de polarización para filtrar ecos no deseados. Comprender y abordar las trayectorias múltiples garantiza que los radares entreguen datos precisos y de alta fidelidad, esenciales para aplicaciones en ciudades inteligentes y navegación autónoma. En general, equilibrar estos elementos conduce a radares que no sólo son teóricamente capaces sino también prácticamente confiables.