


複数ターゲットの識別: スマート トラフィックにおけるミリ波レーダーの隠れた利点
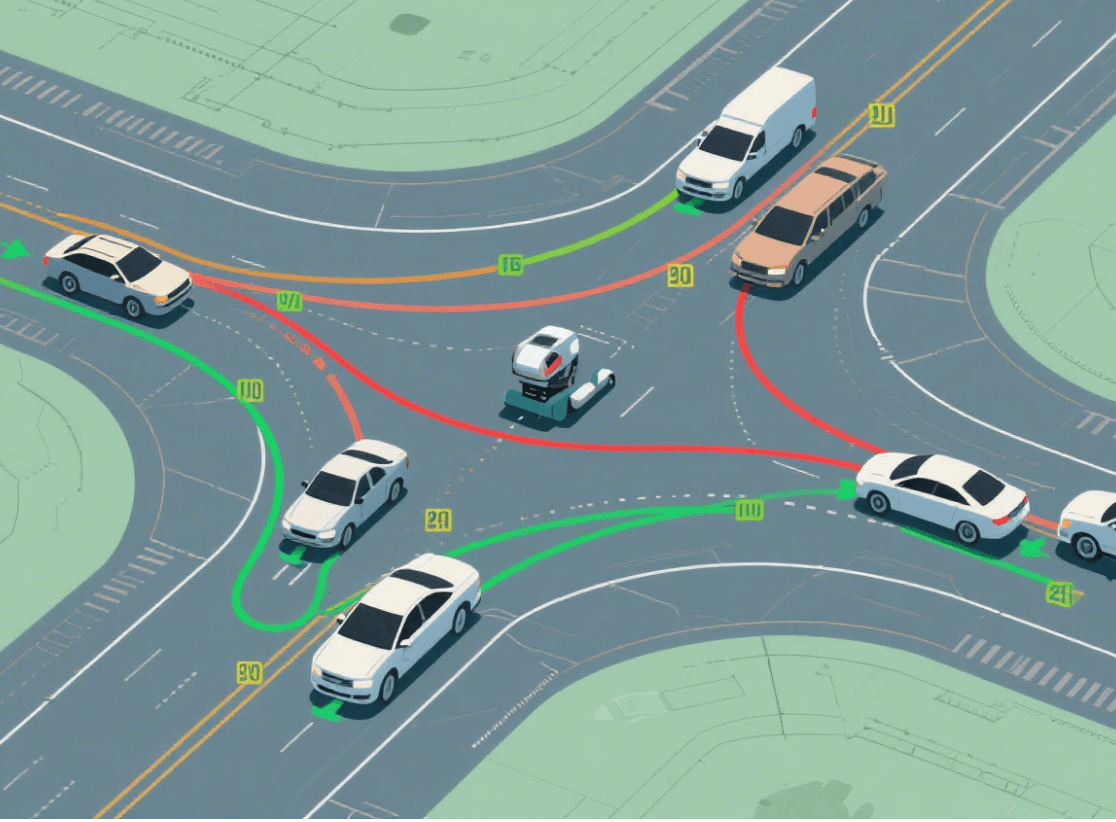
現代の都市では、交通環境が単純であることはほとんどありません。交差点には、さまざまな速度や方向で移動する車、バス、自転車、歩行者で埋め尽くされた複数の車線が含まれることがよくあります。インテリジェントな交通管理システムにとって、これらのターゲットを正確に検出し、リアルタイムで区別することは、最も複雑な技術的課題の 1 つです。
誘導ループ検出器、赤外線センサー、ビデオ カメラなどの従来のセンシング テクノロジーは、交通監視に広く導入されています。ただし、複数のオブジェクトが同じ視野内で重なったり、同時に移動したりするシナリオでは困難を伴います。ここで、ミリ波 (mmWave) レーダーの決定的な利点が示されます。それは、複数目標の識別能力です。
複数ターゲットの検出が重要な理由
ラッシュアワーの混雑した都市部の交差点を想像してみてください。車は赤信号で待機し、自転車は車線の間を縫うように進み、歩行者は縁石から降りる。交通システムの場合、これらのターゲットを区別できないと、車両数の間違い、信号の変更の遅れ、さらには弱い立場の道路利用者の安全上のリスクにつながる可能性があります。
複数ターゲットの識別により、システムは次のことが可能になります。
-
交通渋滞の中でも正確に車両を数えて分類します。
-
移動物体と静止物体を分離し、検出エラーを防ぎます。
-
歩行者や自転車などの交通弱者をリアルタイムで認識します。
-
正確なオブジェクトレベルのデータにより自動運転の意思決定が向上するVehicle-to-Everything(V2X)通信を有効にします。
この機能がなければ、インテリジェント交通ソリューションは道路の真の複雑さを認識できないままになってしまいます。
ミリ波レーダーが複数目標の識別を実現する方法
ミリ波レーダーの強さの基礎はその動作原理にあります。 60 ~ 81 GHz 帯域の電磁波を送信し、反射信号を分析することにより、レーダーは距離と速度だけでなく角度分解能も抽出できます。
1.範囲解像度
高周波ミリ波レーダーは、優れた範囲分解能を実現します。つまり、同じ視線に沿ってわずかな距離しか離れていない 2 つの物体を区別できます。たとえば、停止している車両とそのすぐ後ろの自転車は、1 つではなく 2 つの別々のターゲットとして認識されます。
2.ドップラー速度測定
カメラとは異なり、レーダーは本質的にドップラー効果を使用して速度を測定します。これにより、画像面内で両方がほぼ同じ位置を占めている場合でも、移動する歩行者と静止した標識を区別することが可能になります。
3. MIMO アンテナを使用した角度分解能
Linpowave の V300 シリーズなどの最新のミリ波レーダー モジュールは、MIMO (複数の入力複数出力)アンテナ構成。これにより角度分解能が大幅に向上し、隣接する車線の 2 台の車など、隣り合った物体をレーダーで区別できるようになります。
4.高度な信号処理
ビームフォーミング、クラスタリング アルゴリズム、機械学習を適用することで、レーダー システムは複数の軌道を同時に追跡できます。これにより、歩行者が車両の前を横切る場合など、対象物が交差するシナリオでも安定した検出が可能になります。
従来のセンサーと比べた利点
カメラ
-
弱点: 照明が悪い、まぶしさ、気象条件の影響を受けやすい。
-
レーダーの利点: 物体の分離を維持しながら、雨、霧、夜間の状況でも確実に動作します。
誘導ループ
-
弱点: 大型の金属製車両の存在のみを検出し、複数のターゲットや弱い立場の道路利用者を区別する機能はありません。
-
レーダー アドバンテージ: 車両、自転車、歩行者を同様に検出し、同時に分類します。
赤外線センサー
-
弱点: 範囲が限られており、重複する熱の兆候を区別するのが難しい。
-
レーダー アドバンテージ: 長距離検出を提供します (Linpowave を使用すると最大 300 m) V200)、密集したオブジェクトを高解像度で分離します。
現実世界のアプリケーション
1.スマート交差点
複雑な交差点では、マルチターゲット機能を備えたレーダーにより、信号機が流れに動的に適応できます。静的なタイマーに依存する代わりに、システムは歩行者の安全を確保しながら、渋滞の激しい方向の青信号を優先することができます。
2.高速道路の入口ランプ
複数の車両が異なる速度で合流する場合、レーダー センサーは個々の車両の軌跡を正確に追跡します。このデータは、渋滞を軽減し、安全性を高めるランプメーターシステムをサポートしています。
3.脆弱な道路利用者 (VRU) の保護
自転車や歩行者は予期せぬ動きをすることがよくあります。レーダーは、大型車両の近くまたは背後にある場合でも、それらを個別に検出して追跡します。これは、コネクテッドカーの自動ブレーキ システムにとって非常に重要です。
4.コネクテッドカーエコシステム
V2X アプリケーションでは、レーダーは自律的な意思決定に必要な信頼できるターゲットレベルのデータを提供します。複数のターゲットを識別することで、混雑した交通状況であっても車両が正確な状況を認識できるようになります。
導入に関する考慮事項
ミリ波レーダーには大きな利点がありますが、導入を成功させるには慎重な検討が必要です。
-
センサーの配置: 角度解像度を最大化し、オクルージョンを最小限に抑えるには、適切な高さと角度が重要です。
-
他のセンサーとの統合: レーダーは、分類を改良するためにカメラまたは LiDAR と組み合わせると最も効果的に機能します。
-
キャリブレーションとアルゴリズム: 複数のターゲットを効果的に追跡するには、生のレーダー データを堅牢な信号処理と組み合わせる必要があります。
結論
複数ターゲットの識別は単なる技術仕様ではありません。それは次世代のスマート交通システムの鍵を握るのです。ミリ波レーダーは、車両、歩行者、自転車をリアルタイムで区別することで、従来のセンサーによって残されたギャップを埋め、インテリジェントな交通機関の安全性、効率性、拡張性を確保します。
渋滞を緩和し、交通弱者の保護を目指す都市にとって、Linpowave のレーダー ソリューションなど、強力なマルチターゲット機能を備えたレーダー テクノロジーの導入はもはやオプションではありません。これは、真にスマートな交通エコシステムの基盤です。