










ドップラー処理によるレーダーシステムの課題克服
現代のレーダーアプリケーションにおいて、最も差し迫った課題の一つは、都市部や悪天候などの複雑な環境下で、移動目標と静止したノイズを区別することです。この問題は、誤報、検出信頼性の低下、リソースの非効率な使用につながることがよくあります。ドップラー処理は、ドップラー効果を利用して反射信号の周波数シフトを解析することで、これらの課題に対処するための重要な技術として注目されています。これにより、レーダーに対する目標の動きに基づいて、より明確な分離が可能になります。
混雑した環境における検出範囲の拡大
レーダーシステムの重要な制約の一つは、探知範囲の制限です。信号は距離が離れるにつれて弱まり、ノイズや干渉によって隠されてしまいます。従来の方法では、一定の閾値を超えると精度を維持することが難しく、監視や追跡能力が損なわれてしまいます。ドップラー処理は、静止した物体からのエコーを除去し、移動物体からのエコーを増幅することで、この問題を解決し、探知範囲を効果的に拡張します。例えば、周波数スペクトルを処理することで、ターゲットからのドップラーシフトを分離し、消費電力を増やすことなく、レーダーがより遠距離(場合によっては数キロメートル)にある物体を探知できるようにします。これは運用効率を向上させるだけでなく、複数のレーダー設備の必要性を減らすため、防衛および航空分野にとって費用対効果の高いソリューションとなります。
精密なターゲティングのための角度精度の向上
もう一つのよくある問題は、角度精度が低いことです。これは、ターゲットの位置特定が不正確になり、誘導システムや衝突回避システムにエラーが発生する原因となります。複数の移動物体が存在するシナリオでは、レーダーは正確な角度位置の特定に曖昧さを生じやすく、航空交通管制などのリアルタイムアプリケーションにおけるリスクを増大させます。ドップラー処理は、速度データと角度測定値を統合し、ビームフォーミング処理を改良して高解像度を実現することで、この問題を軽減します。モノパルス処理とドップラー解析を組み合わせた技術を用いることで、角度誤差を1度未満にまで縮小でき、密集した状況でもターゲットを正確に特定できます。この改善は、きめ細かな空間認識を必要とするアプリケーションにとって不可欠であり、潜在的な危険を管理可能な情報へと変換します。
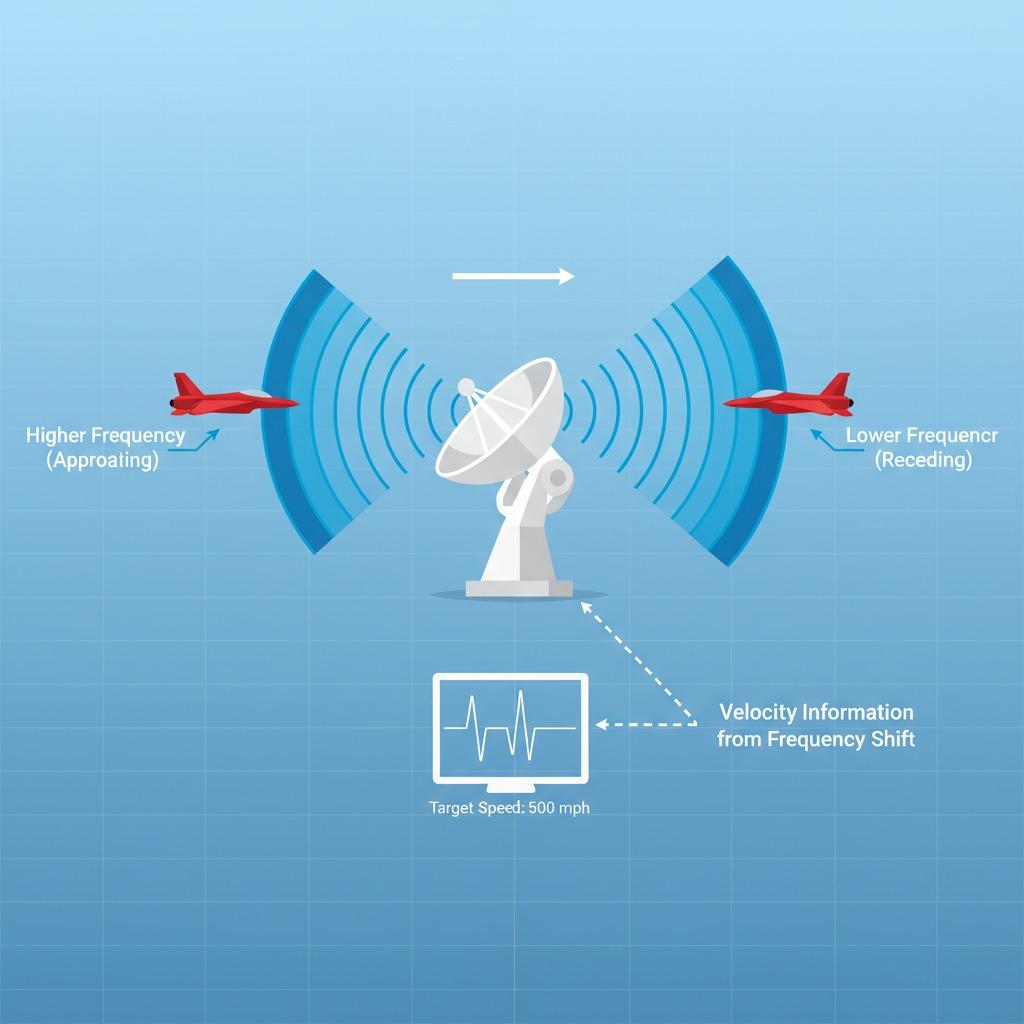
動的追跡のための高精度速度測定
高速移動物体の追跡は、速度測定の精度が低いため、大きな困難を伴います。従来のレーダーでは、ノイズの中で速度を区別することができず、予測が不安定になったり、捕捉に失敗したりすることがあります。これは、速度の誤判断が深刻な結果を招く可能性がある軍事用または自動車用レーダーシステムにおいて特に問題となります。ドップラー処理は、ターゲットの視線速度に比例する反射信号の位相シフトを測定することで、この問題に直接対処し、リアルタイムで正確な速度データを提供します。ドップラー処理の高度なアルゴリズムは、毎秒数メートルから数百メートルまでの速度を解像でき、軌道を予測する予測追跡モデルを可能にします。マルチパルス積分を組み込むことで、マルチパス伝搬による誤差を最小限に抑え、適応応答戦略をサポートする信頼性の高い速度測定を実現します。
優れた距離分解能の実現
最後に、距離分解能が不十分だと、近接したターゲットを分離する能力が阻害され、多くの場合、それらが単一のエコーに融合し、重要な詳細が不明瞭になります。この課題は、港湾や戦場のような高密度環境では特に深刻で、わずか数メートルしか離れていない物体を区別することが不可欠です。ドップラー処理は、広帯域信号とコヒーレント積分を利用して、センチメートル単位の距離を分解する高解像度プロファイリングによってこの問題を解決します。ドップラー情報とパルス圧縮技術を組み合わせることで、ターゲットの識別能力が向上し、重なりを防ぎ、詳細なシーン分析が可能になります。このソリューションは、システム全体のパフォーマンスを向上させるだけでなく、イメージング用の合成開口レーダーなどの高度な機能も容易にし、分解能のボトルネックに対する包括的な解決策を提供します。
要約すると、ドップラー処理はレーダーが抱える課題に対する革新的なアプローチであり、探知範囲、角度精度、速度測定、および距離分解能に関するソリューションを統合します。この技術を採用することで、エンジニアやオペレーターは、厳しい条件下でも確実に動作する、より堅牢で効率的なシステムを構築でき、最終的にはセキュリティから輸送まで、幅広い分野の発展に貢献します。