









レーダーの解像度と精度について理解する
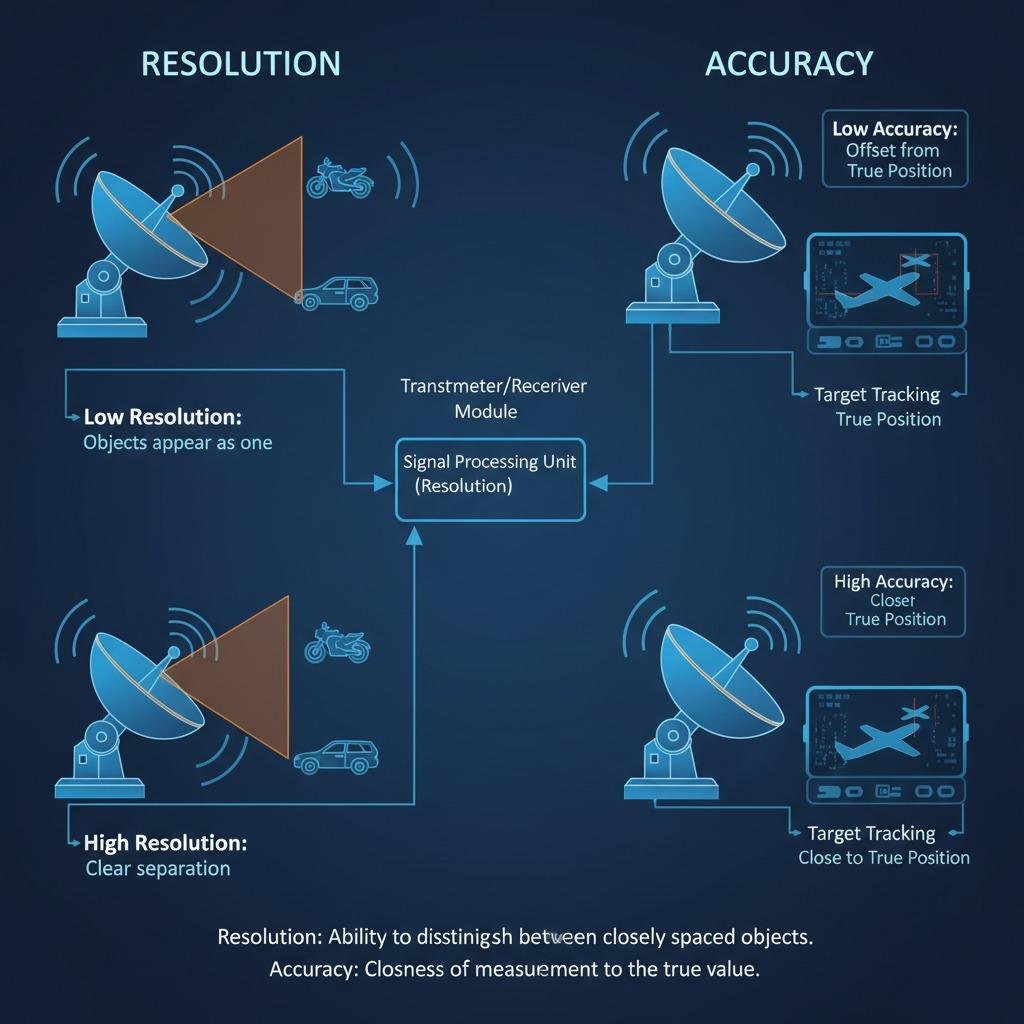
レーダーの解像度と精度はレーダー テクノロジーの基本的な違いであり、自動車の安全システムから産業用監視に至るまで、さまざまなアプリケーションにわたるレーダーの有効性に影響します。解像度とは、密集したターゲットを区別するレーダーの能力、つまり、空間または時間内で物体をどれだけ細かく分離できるかを指します。一方、精度は、レーダーの測定値がターゲットの実際の位置、速度、または特性とどの程度一致しているかを測定します。実際には、高解像度により、システムは近くの複数の物体をぼかさずに検出でき、精度により、それらの検出が確実に正確になります。この比較は、最新のレーダー設計、特に信頼性の高いパフォーマンスが要求される環境では非常に重要です。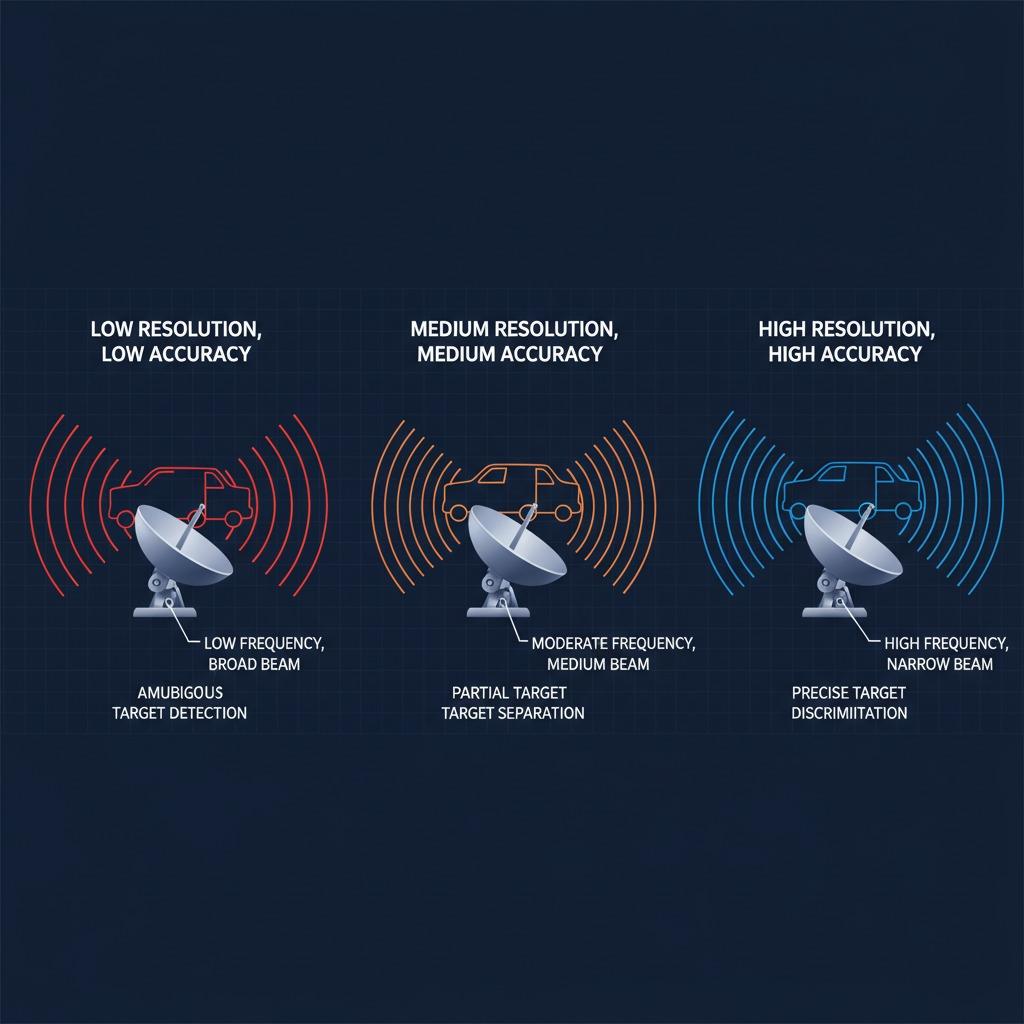
ミリ波レーダーの性能における重要な要素
ミリ波レーダーのパフォーマンスは、特に 30 ~ 300 GHz で動作する高周波数帯域において、最適なレーダー解像度と精度を達成する上で極めて重要な役割を果たします。これらのレーダーは、狭いビームを生成する能力により短距離検出に優れており、角度と距離の分解能を低周波数の代替品では達成できないレベルまで高めます。たとえば、ミリ波システムは、わずか数センチメートル離れたオブジェクトを解決できるため、ジェスチャ認識や衝突回避などのアプリケーションに最適です。ただし、そのパフォーマンスは、距離が長くなると信号品質が低下する可能性がある大気減衰などの課題によって低下します。これを軽減するために、エンジニアはアンテナ アレイと信号処理アルゴリズムの最適化に重点を置き、レーダーが微細な詳細を解決するだけでなく、さまざまな条件下でも正確な読み取り値を維持できるようにします。業界レポートの統計によれば、ミリ波レーダーは範囲内で最小 4 cm の分解能を実現し、管理されたテストでは誤差範囲 1% 以内の精度を実現します。
Linpowave レーダー テクノロジーに関する洞察
Linpowave レーダーは、レーダー解像度と精度の議論における高度な反復を表しており、独自の信号処理を活用して優れた目標識別を実現します。このテクノロジーは、マルチ入力マルチ出力 (MIMO) 構成を統合し、解像度と精度の両方を同時に向上させる強化された仮想アパーチャを可能にします。都市交通監視などの現実世界のシナリオでは、Linpowave レーダーは、95% を超える位置精度で、最大 200 メートルの範囲で車両と歩行者を区別できます。従来のレーダーと比較して、エコーの解釈方法を改良することで誤検知を減らし、理論的な分解能の限界と実際の精度の間のギャップを埋めます。 Linpowave の開発者は、コンパクトなサイズでもパフォーマンス指標を犠牲にしない、IoT デバイスへの統合のための拡張性を強調しています。
レーダー システムにおける信号の安定性の役割
受信信号の変動により両方の側面が歪む可能性があるため、信号の安定性はレーダーの解像度と精度を評価する際の基礎となります。信号が安定すると、一貫した波形の完全性が保証され、速度精度に影響を与えるドップラー シフト計算のエラーが防止されます。ノイズの多い環境では、信号の安定性を維持するために周波数変調連続波 (FMCW) 変調などの技術が採用され、レーダーは測定誤差を 0.5 メートル/秒未満に抑えながら、角度で 1 度という微細な分解能を達成できます。最近の研究からの洞察によると、堅牢な信号安定性を備えたレーダーは、悪天候時の精度において他のレーダーよりも 20 ~ 30% 優れており、信頼性の高い運用にとってレーダーの重要性が強調されています。
マルチパス反射の課題を乗り越える
マルチパス反射は、信号が表面で反射して複数のパスを経由して到達し、干渉やゴーストターゲットを引き起こすため、レーダー解像度と精度のフレームワークにおいて大きな障害となります。この現象により、誤った分離が生じて解像度が低下したり、知覚されるオブジェクトの位置が移動して精度が低下したりする可能性があります。適応ビームフォーミングや機械学習ベースのクラッター除去などの高度な軽減戦略は、これらの影響を打ち消すのに役立ちます。たとえば、屋内設定では、マルチパス反射によって有効解像度要件が最大 50% 倍になる可能性がありますが、ミリ波を使用するような最新のシステムには、不要なエコーを除去するために偏波ダイバーシティが組み込まれています。マルチパスを理解して対処することで、レーダーがスマート シティや自律ナビゲーションのアプリケーションに不可欠な正確で忠実度の高いデータを確実に提供できるようになります。全体として、これらの要素のバランスをとることにより、理論的に機能するだけでなく、実際的にも信頼できるレーダーが得られます。