

引言:多车道交通速度测量的挑战
在多车道交通中测量车辆速度面临着多项技术和操作方面的挑战:
车辆距离:在高速公路上,相邻车道的车辆通常仅相距 3-5 米。标准雷达可能会将多辆车的距离混淆到一次测量中。
速度变化:车辆的加速和减速方式不同,重型卡车和摩托车需要不同的跟踪算法。
环境因素:雨、雾、灰尘和眩光会降低光学或激光雷达的精度。
多径反射:城市高速公路上的混凝土护栏和标志会引起雷达反射,可能导致误报。
这些挑战向交通管理部门和工程师提出了一个核心问题:
“ 毫米波雷达能否在实际条件下,对多条车道上的车辆速度进行精确、实时的测量?”
毫米波雷达为何如此出色
Linpowave V200 毫米波雷达通过以下几个关键功能应对这些挑战:
扩展检测范围:0.4–300 米,可及早发现远处接近的车辆,这对于实时速度分析至关重要。
高速分辨率:基于多普勒的测量精度可达±0.5公里/小时。这种精度水平可同时用于执法和交通分析。
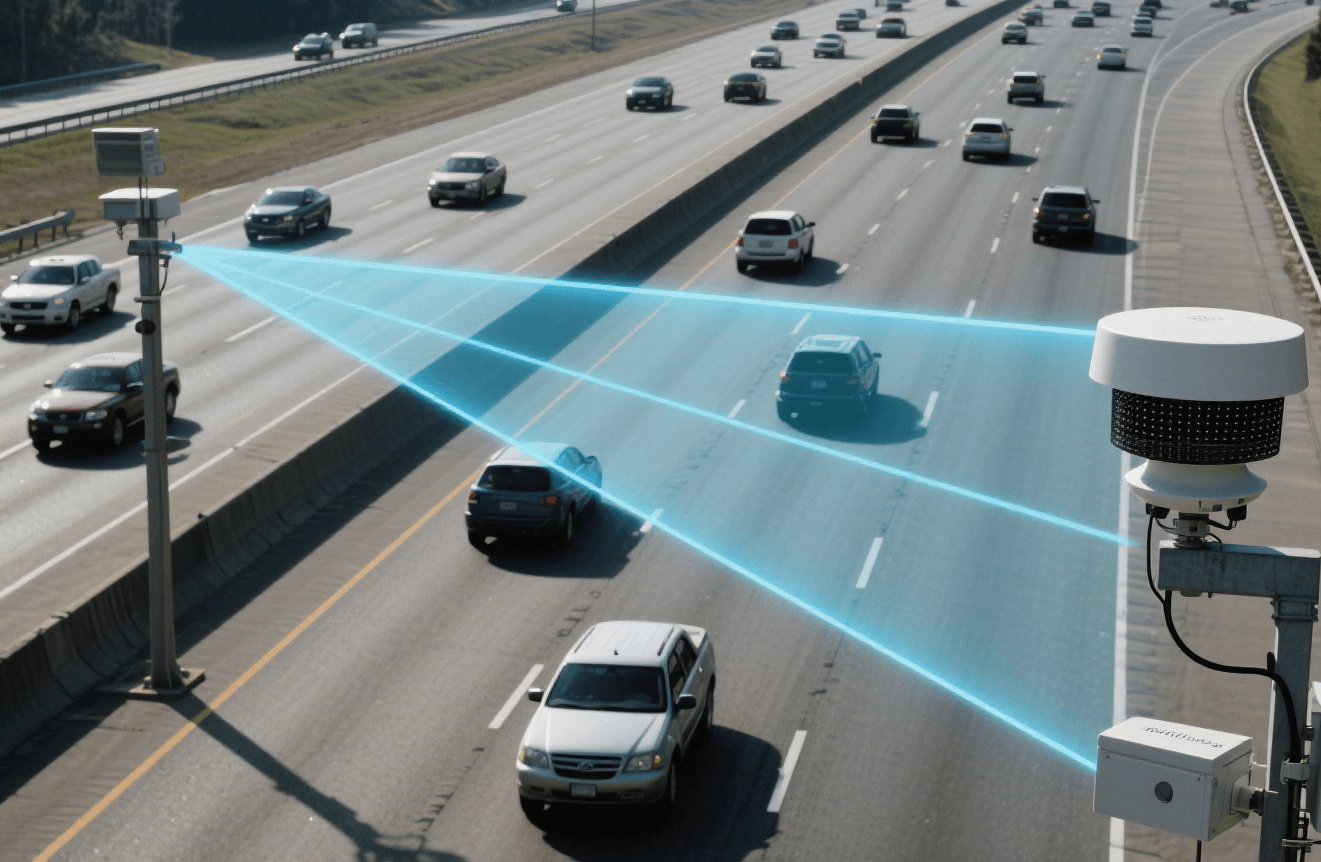
多车道多目标跟踪:每个雷达单元能够跨多条车道跟踪 6-8 辆车,并按车道和速度区分车辆。
全天候运行:与相机或激光雷达不同,毫米波雷达在雨、雾、尘或眩光下仍能保持精度,确保持续运行。
低延迟:50毫秒的反应时间支持实时监控和即时速度报告。
紧凑轻巧:尺寸为 70×50×5.5 毫米,重量为 15 克,安装在龙门架、杆或移动单元上非常简单,无需进行繁重的结构加固。
节能高效:平均功率仅为 4 瓦,可实现持续运行,且能耗极低。
量化绩效指标
近期实地部署提供了具体的性能数据:
| 指标 | 价值 |
|---|---|
| 检测范围 | 0.4–300 米 |
| 速度精度 | ±0.5 公里/小时 |
| 多车道覆盖 | 同时行驶6-8条车道 |
| 反应时间 | ≤50毫秒 |
| 误检率 | 在交通拥堵情况下,低于 3%。 |
| 漏检率 | 宽度超过 1.5 米的车辆,占比低于 1%。 |
案例研究:在大都市的一条六车道高速公路上,Linpowave 雷达实时追踪每辆车的速度和车道分配情况。尽管交通拥堵严重,且车辆类型多样(包括轿车、公交车和卡车),该雷达仍保持了 97% 以上的车道识别准确率和 ±0.5 公里/小时的速度识别准确率。相比之下,在光线不足的情况下,仅靠摄像头会漏检高达 15% 的车辆,而传统雷达对间距较近的车辆的误判率则高达 20%。
这表明毫米波雷达能够提供可靠的高分辨率交通数据,这对交通管理、执法和拥堵分析至关重要。
部署和优化策略
为了最大限度地提高多车道交通中的导航准确率,建议采用以下策略:
最佳安装高度和角度
将雷达安装在路面上方 5-7 米处,并略微向下倾斜。这样既能最大限度地减少遮挡,又能覆盖多条车道。
高级信号处理
应用 FFT 分析和多普勒滤波来分离距离较近的车辆并抑制多径反射。
车道分配算法
使用多目标跟踪结合车道特定预测算法,以保持每条车道的准确速度读数。
传感器融合(可选)
将雷达与摄像头或激光雷达系统结合使用,用于识别交通违章行为或车辆分类。
定期校准和健康检查
持续监测雷达性能可确保速度精度保持在±0.5公里/小时以内。
通过实施这些策略,即使在复杂的城市交通环境中,各机构也能保持较高的数据完整性。
实际应用及价值
公路执法
精确的多车道速度测量无需多个传感器即可实时检测所有车道上的超速车辆。
交通流量分析
连续的速度数据可用于交通拥堵建模、自适应信号配时和预测性交通管理。
事件检测
车速突然下降或交通模式异常会触发事故或车辆故障警报。
成本效益
一个毫米波雷达单元可以取代多个感应线圈或摄像头,从而降低基础设施和维护成本。
例如:在六车道城市高速公路上部署 Linpowave 雷达,与传统雷达相比,车道误分类错误减少了 90% 以上,同时在雨雾中保持连续运行。
结论
毫米波雷达是一种高度可靠的多车道车辆速度检测解决方案,具有以下优点:
高分辨率和±0.5公里/小时的速度精度
同时进行多车道、多目标跟踪
全天候运行,低延迟
结构紧凑、轻巧节能的设计
毫米波雷达通过优化安装、先进的信号处理、车道分配算法和可选的传感器融合,能够实现精确的实时交通监控,从而提高安全性、效率和执法效果。