

多目标辨别:毫米波雷达在智能交通中的隐藏优势
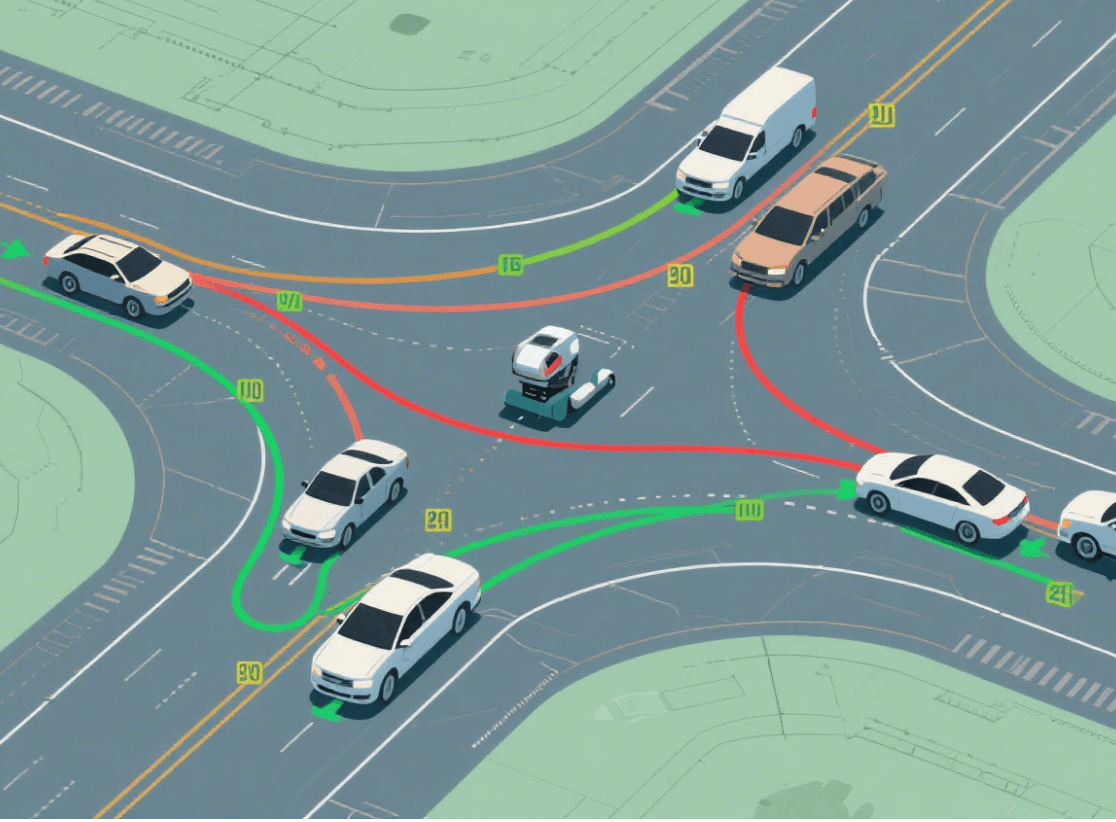
在现代城市,交通环境绝非简单。十字路口通常有多条车道,里面挤满了汽车、公共汽车、自行车和行人,它们都以不同的速度和方向行驶。对于智能交通管理系统来说,准确检测并实时区分这些目标是最复杂的技术挑战之一。
传统传感技术(例如感应环路探测器、红外传感器和摄像机)已广泛应用于交通监控。然而,在多个物体重叠或在同一视野内同时移动的情况下,它们会遇到困难。这正是毫米波 (mmWave) 雷达显示出决定性优势的地方:其多目标辨别能力。
<小时数据开始=“1050”数据结束=“1053”>为什么多目标检测很重要
想象一下高峰时段繁忙的城市十字路口。汽车在等红灯,骑自行车的人在车道之间穿梭,行人正在走下路边。对于交通系统来说,无法区分这些目标可能会导致车辆计数不正确、信号变化延迟,甚至给弱势道路使用者带来安全风险。
多目标区分使系统能够:
-
即使在交通拥挤的情况下也能准确对车辆进行计数和分类。
-
将移动物体与静止物体分开,防止检测错误。
-
实时识别行人和骑自行车者等弱势道路使用者。
-
启用车对万物 (V2X) 通信,其中精确的对象级数据可改善自动驾驶决策。
如果没有此功能,智能交通解决方案将无法了解道路的真正复杂性。
毫米波雷达如何实现多目标识别
毫米波雷达的优势在于其工作原理。通过发射 60-81 GHz 频段的电磁波并分析反射信号,雷达不仅可以提取距离和速度,还可以提取角分辨率。
1.距离分辨率
高频毫米波雷达可实现精细的距离分辨率,这意味着它可以区分两个物体,即使它们在同一视线上相距很短。例如,一辆停下来的车辆和紧随其后的骑自行车的人将被视为两个独立的目标,而不是一个。
2.多普勒速度测量
与摄像头不同,雷达本质上利用多普勒效应来测量速度。这使得将移动的行人和静止的路标分开成为可能,即使两者在图像平面中占据几乎相同的位置。
3. MIMO 天线的角度分辨率
现代毫米波雷达模块,例如Linpowave的V300系列,利用MIMO(多输入多输出) 天线配置。这显着提高了角度分辨率,使雷达能够区分并排的物体,例如相邻车道上的两辆车。
4.高级信号处理
通过应用波束成形、聚类算法和机器学习,雷达系统可以同时跟踪多个轨迹。这可以在目标相交的场景中实现稳定的检测,例如行人在车辆前面穿过时。
相对于传统传感器的优势
相机
-
弱点:容易受到光线不足、眩光和天气条件的影响。
-
雷达优势:在雨、雾和夜间条件下可靠运行,同时保持物体分离。
感应环
弱点:仅检测大型金属车辆的存在,无法区分多个目标或易受伤害的道路使用者。
雷达优势:检测车辆、骑自行车的人和行人,同时进行分类。
红外传感器
-
弱点:范围有限,难以区分重叠的热信号。
-
雷达优势: 提供远距离检测(使用 Linpowave 的检测距离可达 300 m V200)并以高分辨率分离紧密间隔的物体。
实际应用
1.智能十字路口
在复杂的路口,具有多目标功能的雷达允许交通信号灯动态适应流量。系统可以优先考虑严重拥堵方向的绿灯,同时确保行人安全,而不是依赖静态计时器。
2.高速公路入口
当多辆车以不同速度汇合时,雷达传感器会准确跟踪它们各自的轨迹。这些数据支持坡道计量系统,以减少拥堵并提高安全性。
3.弱势道路使用者 (VRU) 保护
骑自行车的人和行人的移动常常是不可预测的。雷达确保它们能够被单独检测和跟踪,即使在大型车辆附近或后面也是如此。这对于联网车辆的自动制动系统至关重要。
4.互联汽车生态系统
在 V2X 应用中,雷达提供自主决策所需的可靠目标级数据。多目标辨别确保车辆即使在拥挤的交通中也能获得准确的态势感知。
部署注意事项
虽然毫米波雷达具有显着优势,但成功部署需要仔细考虑:
传感器放置:正确的高度和角度对于最大化角度分辨率和最小化遮挡至关重要。
与其他传感器集成:雷达与摄像头或激光雷达融合以进行分类细化时效果最佳。
校准和算法:原始雷达数据必须与强大的信号处理相结合,以实现有效的多目标跟踪。
结论
多目标区分不仅仅是一个技术规范;它是解锁下一代智能交通系统的关键。毫米波雷达通过实时区分车辆、行人和骑自行车的人,弥补了传统传感器留下的空白,确保智能交通的安全性、效率和可扩展性。
对于寻求减少拥堵并保护弱势道路使用者的城市来说,采用具有强大多目标能力的雷达技术(例如 Linpowave 的雷达解决方案)不再是可选的。它是真正智能交通生态系统的基础。