








了解雷达分辨率与精度
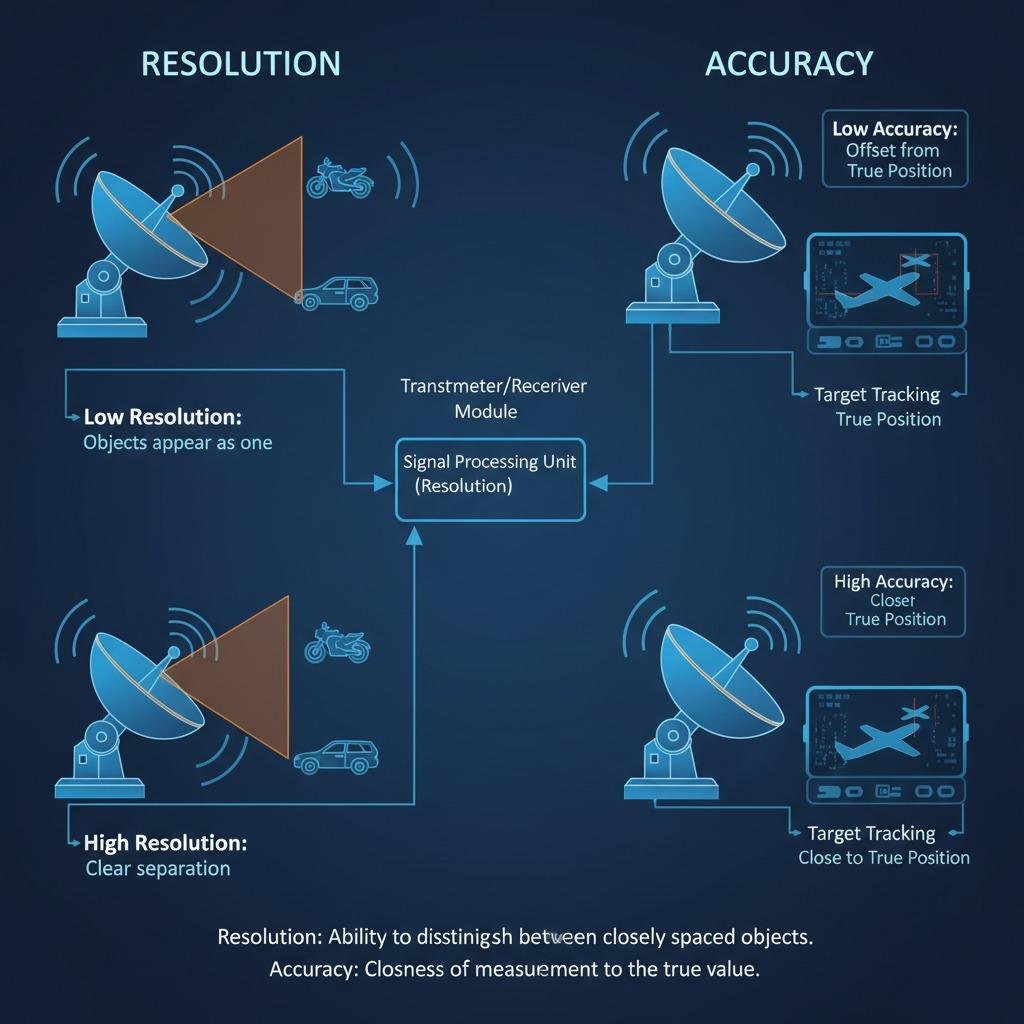
雷达分辨率与精度是雷达技术的一个基本区别,影响着从汽车安全系统到工业监控等各种应用的有效性。分辨率是指雷达区分近距离目标的能力,本质上是指雷达在空间或时间上区分物体的精细程度。另一方面,准确性衡量雷达测量结果与这些目标的真实位置、速度或特征的吻合程度。实际上,高分辨率允许系统检测多个附近的物体,而不会将它们模糊在一起,而准确性则确保这些检测可靠且精确。这种比较对于现代雷达设计至关重要,特别是在要求可靠性能的环境中。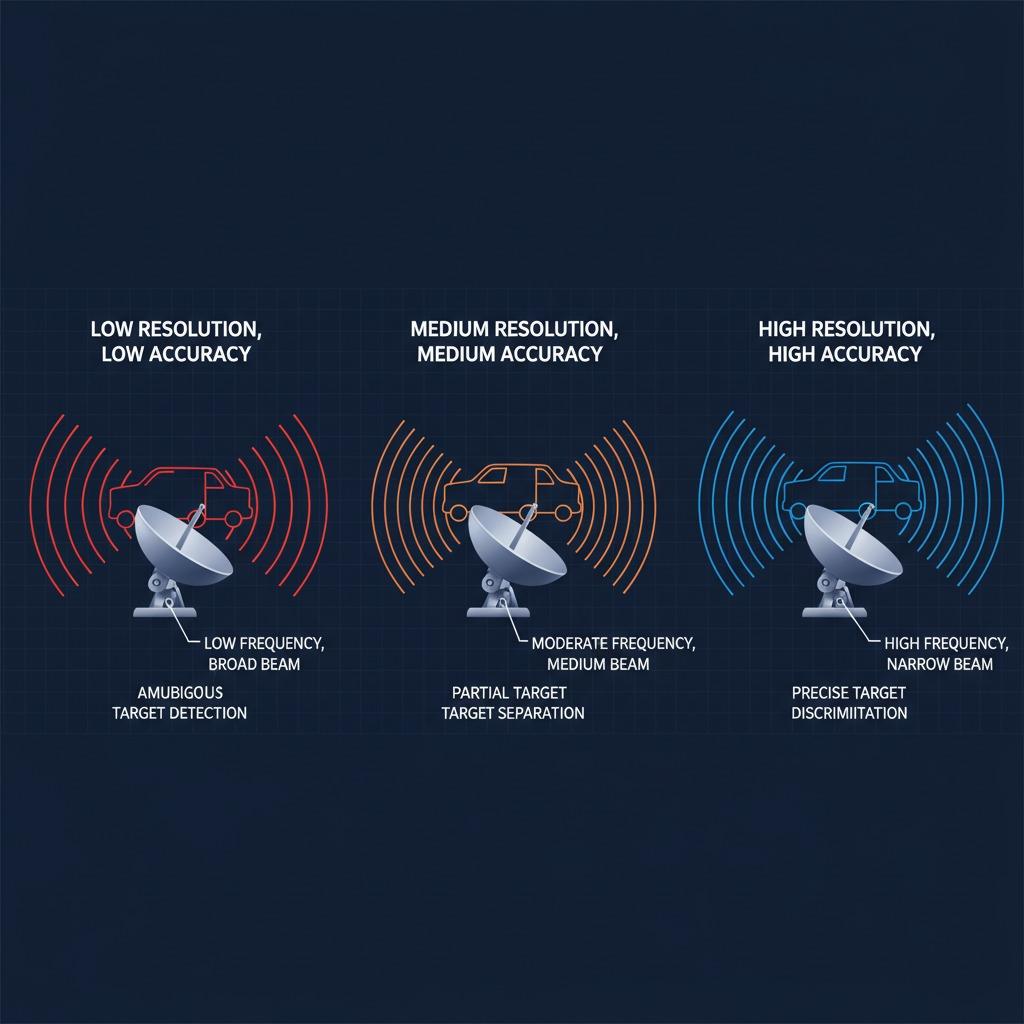
毫米波雷达性能的关键因素
毫米波雷达性能在实现最佳雷达分辨率与精度方面发挥着关键作用,特别是在 30 至 300 GHz 之间的高频段中。这些雷达在短距离探测方面表现出色,因为它们能够产生窄波束,将角度和距离分辨率提高到低频替代品无法达到的水平。例如,毫米波系统可以解析仅相距几厘米的物体,使其成为手势识别或防撞等应用的理想选择。然而,它们的性能受到大气衰减等挑战的影响,大气衰减会随着距离的推移而降低信号质量。为了缓解这一问题,工程师专注于优化天线阵列和信号处理算法,确保雷达不仅能解析精细细节,还能在不同条件下保持准确的读数。行业报告的统计数据表明,毫米波雷达在范围内的分辨率可达到 4 厘米,在受控测试中精度在 1% 的误差范围内。
Linpowave 雷达技术洞察
Linpowave 雷达代表了雷达分辨率与精度争论的先进迭代,利用专有的信号处理来提供卓越的目标辨别能力。该技术集成了多输入多输出 (MIMO) 配置,可增强虚拟孔径,同时提高分辨率和精度。在城市交通监控等现实场景中,Linpowave雷达可以区分最远200米范围内的车辆和行人,定位精度超过95%。与传统雷达相比,它通过改进回波的解释方式来减少误报,从而缩小理论分辨率限制与实际精度之间的差距。 Linpowave 的开发人员强调其可集成到 IoT 设备中的可扩展性,其中紧凑的尺寸不会影响性能指标。
信号稳定性在雷达系统中的作用
信号稳定性是评估雷达分辨率与精度的基石,因为接收信号的波动会扭曲这两个方面。稳定的信号可确保一致的波形完整性,防止多普勒频移计算中出现影响速度精度的错误。在嘈杂的环境中,采用调频连续波 (FMCW) 调制等技术来保持信号稳定性,使雷达能够实现高达 1 度的角度分辨率,同时将测量误差保持在每秒 0.5 米以下。最近的研究表明,具有强大信号稳定性的雷达在恶劣天气下的准确度比其他雷达高出 20-30%,这凸显了它们对于可靠运行的重要性。
应对多路径反射挑战
多路径反射在雷达分辨率与精度框架中构成了重大障碍,其中信号从表面反弹并通过多条路径到达,导致干扰和幽灵目标。这种现象会通过产生错误的分离来降低分辨率,并通过移动感知的物体位置来降低准确性。先进的缓解策略,包括自适应波束成形和基于机器学习的杂波抑制,有助于抵消这些影响。例如,在室内环境中,多径反射可使有效分辨率要求提高高达 50%,但现代系统(例如使用毫米波的系统)采用偏振分集来滤除不需要的回声。了解和解决多路径问题可确保雷达提供精确、高保真的数据,这对于智能城市和自主导航应用至关重要。总体而言,平衡这些要素可以使雷达不仅具有理论上的能力,而且实际上也可靠。