









为什么场景分割在感知系统中至关重要
场景分割是那种听起来很抽象的工程术语,但一旦系统出现问题,它就变得至关重要了。在雷达、视觉、机器人和其他感知驱动型应用中,真正的难题不仅仅是检测到目标的存在。更难的是将不同的区域区分开来,以便系统能够判断哪些物体在移动,哪些物体是静止的,以及哪些物体需要特别关注。对于工程师和产品团队来说,这种区分会影响性能、误报率、后续跟踪,并最终影响产品在实际应用中的实用性。
这就是为什么场景分割在许多设计决策中占据核心地位。它有助于将嘈杂的输入流转化为结构化的环境视图。如果分割过于粗糙,多个物体就会混杂在一起;如果分割过于激进,场景的部分区域会被分割成毫无意义的碎片。无论哪种情况,都会导致检测能力下降、多目标跟踪性能降低,并使系统更难被信任。
实际问题:原始数据通常难以解读。
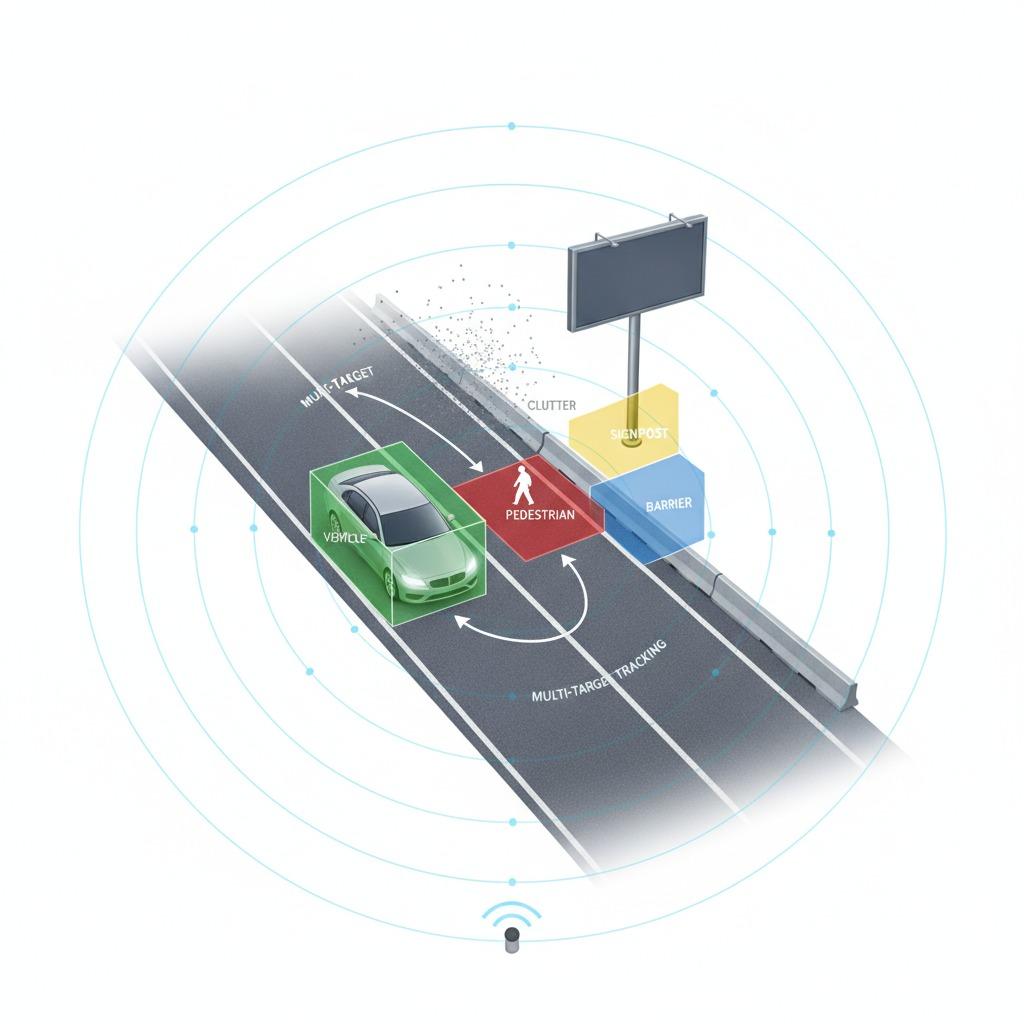
大多数传感系统并非因为没有采集到数据而失效,而是因为采集了过多杂乱无章的数据。反射光重叠、运动物体相互遮挡以及背景结构都会造成持续的杂波。例如,在雷达应用中,车辆、行人、路标和路边护栏都可能同时出现在同一帧画面中。如果没有有效的分割策略,系统看到的将是一片拥挤的回波区域,而不是清晰的场景元素。
杂波抑制在此不再仅仅是一项信号处理功能,而是分割策略本身的一部分。相关目标与背景噪声的分离越清晰,系统就越能准确地解读场景信息。买家通常首先关注探测范围,但在许多实际应用中,可解释性才是更重要的问题。一个能够“看到”远距离目标但无法清晰区分场景组成部分的平台,在实际使用中可能仍然表现不佳。
哪些细分有助于系统做出决定
从根本上讲,场景分割有助于回答四个问题:物体边界在哪里?哪些信号属于同一组?背景是什么?哪些内容发生了变化?这些问题看似简单,但却驱动着许多更高级别的功能。例如,机器视觉系统可以利用场景分割来识别移动网片上的缺陷;雷达系统可以利用场景分割来区分相邻车道上的车辆;移动机器人则可以利用场景分割来区分地面、墙壁、障碍物和人体运动。
思考设计权衡的一个有效方法是:分割效果越好,后续阶段的工作量就越少。当上游场景已被分割成合理的区域时,跟踪、分类和路径预测的性能都会得到提升。在存在遮挡、混合运动或背景快速变化的环境中,这一点尤为重要。
影响分割质量的关键技术因素
空间分辨率
空间分辨率决定了系统在空间中能够分辨的细节程度。如果分辨率受限,两个相邻的物体可能在软件有机会分析它们之前就融合为一个区域。更高的分辨率可以改善场景分割,但也会增加处理负载,并可能带来新的校准和数据处理方面的挑战。工程师应该将分辨率视为系统层面的选择,而不是一个营销指标。
微多普勒特征
在基于雷达的系统中,微多普勒特征可以提供场景内运动模式的重要线索。即使物体在距离或角度上重叠,肢体运动或旋转等微小运动也能帮助区分不同的物体。然而,微多普勒并非万能。它只有在后续处理流程能够有效控制噪声、干扰和采样限制,从而保留细节的情况下才能发挥最佳效果。
杂波抑制
良好的杂波抑制可以防止静态或无关的回波淹没场景图。但需要注意的是:过度抑制杂波可能会移除一些正常的低速运动物体,或者掩盖背景中的细微变化。最佳系统通常采用自适应方法,尤其是在光照、表面状况和反射结构会随时间变化的户外环境中。
多目标跟踪
分割效果通常以其对后续操作的影响来评估。在多目标跟踪中,清晰的分割有助于在不同帧之间保持目标身份的一致性。分割不佳会导致目标区域合并、跟踪中断以及错误重捕获。一旦出现这种情况,跟踪器花费在修复场景上的时间将远超理解场景本身的时间。
买家应该如何比较细分方法
没有一种方法适用于所有应用场景。正确的选择取决于场景的复杂性、物体大小、运动特性以及系统是否需要实时运行。对于简单的环境,基于规则或阈值的方法可能就足够了。在复杂或动态的场景中,更具自适应性的方法通常值得付出额外的计算成本。
在比较不同方案时,要问一些实际问题。该方法能否处理重叠目标?环境条件变化时,它是否仍能保持稳定?目标减速或停止时会发生什么?系统能否保留小目标,还是只优化主要目标?这些并非理论上的问题,而是在试运行和现场验证过程中会实际出现的问题。
导致市场细分不清晰的常见错误
一个常见的错误是将分割视为后处理步骤。当数据已经噪声较大且压缩严重时,许多有用的特征信息都会丢失。另一个错误是假设一个数据集就能证明分割方法的鲁棒性。在受控测试环境中看起来很干净的场景,在雨天、眩光、振动、反光环境或人群拥挤的情况下,其表现可能截然不同。
第三个问题是,系统针对单一目标类型进行优化后,却期望它能泛化。一个对大型移动物体效果良好的分割模型,在小型或速度较慢的目标进入同一空间时,可能表现不佳。买家应该警惕那些看起来精美绝伦,但却无法展现系统在混合条件下表现的演示。
购买或集成前需要问哪些问题
在选择平台或算法之前,务必询问其如何处理各种极端情况,而不仅仅是理想情况。要求提供包含目标重叠、背景干扰和低对比度场景的示例。如果应用依赖于跟踪,请询问分割如何支持跨帧的目标保持。如果应用场景依赖于运动细节,请询问系统如何在不增加干扰的情况下保留运动特征。
从操作层面定义成功也很有帮助。合适的分割方法未必是标签最先进的,而是能够提升实际工作流程决策质量的方法,无论这意味着减少误报、更好地分离对象,还是提高下游跟踪的可靠性。
买家须知简述
当传感系统需要解读拥挤、变化或部分遮挡的环境时,场景分割就显得尤为重要。有效的场景分割能够提升图像清晰度,支持更精准的跟踪,并使整个系统更值得信赖。反之,即使前端传感器本身在纸面上看起来性能优异,弱场景分割也会造成同样的问题。
如果您正在评估一个新平台,不要只关注那些冠以“标榜”的参数,而应该更多地关注系统在实际运行条件下如何分离物体。这通常能体现出一个前景光明的原型和一个真正可用的产品之间的区别。
工程团队的下一步工作
首先要关注场景,而不是功能列表。找出应用中可能出现的杂乱、重叠和运动源,然后测试所提出的分割方法是否能够清晰地分离这些情况。在具有代表性的环境中进行仔细的测试通常比冗长的规格表更有价值,而且坦白说,它往往能节省后续的时间。