









مقدمة: نقطة تحول جديدة في تكنولوجيا الإدراك
تتراجع أنظمة القيادة المساعدة التقليدية لصالح أنظمة القيادة الذاتية الأكثر تطوراً وتنسيقاً. ويفرض هذا التحول متطلبات جديدة على الإدراك، لا سيما قدرته على توفير فهم متسق ومنظم وموثوق للبيئات المعقدة. ولا تزال الأنظمة التي تعتمد على الرؤية فقط تواجه تحديات في ظروف الطرق الواقعية، مثل الضباب والمطر والإضاءة الخلفية ليلاً والجسور متعددة الطبقات والعوائق الثابتة منخفضة الارتفاع. ومن ناحية أخرى، يعاني رادار الموجات المليمترية ثلاثي الأبعاد التقليدي من قيود أيضاً، لأنه لا يستطيع قياس الارتفاع.
في ضوء ذلك، أصبح رادار الموجات المليمترية رباعي الأبعاد تقنية استشعار أساسية تُحسّن إدراك العمق، وتُعزّز الفهم المكاني، وتضمن أداءً موثوقًا به في ظل ظروف بيئية متنوعة. كما أنه يسدّ الثغرات التي خلّفتها أجهزة الاستشعار الأخرى المتدهورة، ويُقدّم بيانات عالية القيمة ومنظمة تتوافق مع أحدث نماذج الإدراك القائمة على المحولات والمركبات الكهربائية.
تتناول هذه المقالة الأهمية التكنولوجية لرادار الموجات المليمترية رباعي الأبعاد، ووظيفته في أنظمة دمج المستشعرات من الجيل التالي، وسيناريوهات التطبيق المهمة، والنشر الواقعي لتقنية Linpowave عبر مستويات القيادة الذاتية المختلفة.
التطور التكنولوجي لرادار الموجات المليمترية رباعي الأبعاد
تحسين التمثيل المكاني من أجل معرفة ثلاثية الأبعاد دقيقة
يُعاني الرادار التقليدي ذو الموجات المليمترية من محدودية قدرته على تحديد الهياكل الرأسية، لأنه يُخرج عادةً بيانات المسافة والسرعة وزاوية السمت. ولهذا السبب، قد يكون من الصعب رصده في حالات المنحدرات والجسور والعوائق المنخفضة أو حركة المرور متعددة الطبقات.
من خلال إضافة الارتفاع (زاوية الميل)، يعمل رادار الموجات المليمترية رباعي الأبعاد على توسيع نطاق الاستشعار المكاني ويسمح بتفسير ثلاثي الأبعاد أكثر شمولاً للمحيط.
يُمكّن هذا التحسين السيارات ذاتية القيادة من التمييز بين:
حركة المرور على المستويات المرتفعة والأرضية
مخاريط المرور، وأرصفة الطرق، وغيرها من العناصر منخفضة الارتفاع
تضاريس الطريق والمنحدرات الصاعدة والهابطة
تتلقى وحدات التخطيط والتحكم مدخلات ذات جودة أعلى من بيانات أكثر تنظيماً، مما يؤدي إلى سلوك أكثر استقراراً وقابلية للتنبؤ للمركبة في مجموعة متنوعة من المواقف.
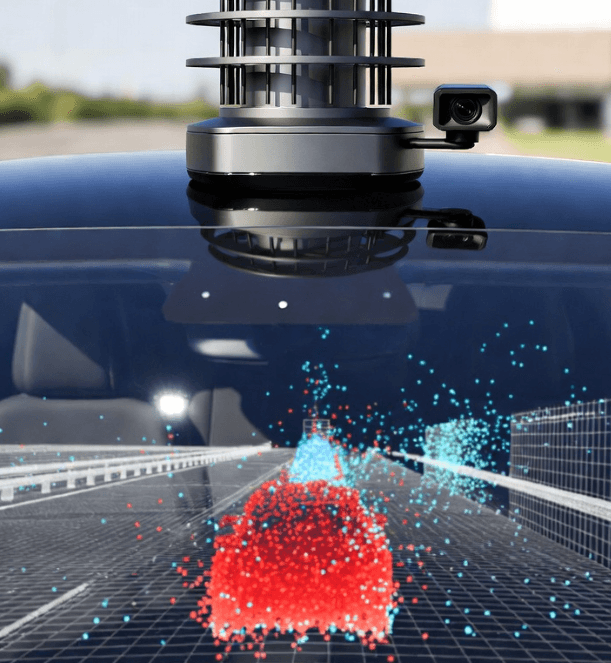
تعبير هندسي أكثر ثراءً من خلال سحابة النقاط عالية الكثافة
يُنتج رادار الموجات المليمترية رباعي الأبعاد سحباً نقطية كثيفة ومنظمة بمساعدة مصفوفات هوائيات MIMO متطورة وخطوط معالجة إشارات مُبسطة. توفر هذه المخرجات تفاصيل مكانية كافية لوصف محيطات الأجسام وأشكالها وأنماط حركتها، على الرغم من أنها ليست بنفس كثافة تقنية LiDAR.
هذا المستوى من الثراء الهندسي يشجع على ما يلي:
فهم دلالي أكثر موثوقية ونمذجة بيئية
أداء ثابت في ظروف الإضاءة المنخفضة أو الأحوال الجوية
تحسينات على معلومات العمق المسبقة لنماذج التعلم العميق القائمة على BEVs
يمكن للرادار رباعي الأبعاد أن يستمر في تقديم بيانات موثوقة ومفيدة في الحالات التي تتدهور فيها الأنظمة البصرية، مثل الأمطار الغزيرة أو الإضاءة الخلفية.
الأهمية المتزايدة للرادار رباعي الأبعاد في دمج البيانات من أجهزة استشعار متعددة
"المستشعر الأساسي" مقابل "المستشعر الداعم"
في الماضي، كان رادار الموجات المليمترية يعمل بشكل أساسي كمستشعر داعم، حيث يوفر معلومات إضافية عن السرعة والمسافة لدعم الرؤية. أما رادار الأبعاد الأربعة، فقد أصبح أكثر أهمية في أنظمة الإدراك مع تحول الصناعة إلى الطبقتين الثانية والثالثة المتقدمتين (L2++ وL3)، مما يزيد الحاجة إلى التكرار واستشعار العمق المنظم.
يتميز نظام Fusion بتماسك أكبر وسهولة في التحسين بفضل تنسيقه السحابي النقطي، الذي يتوافق بشكل طبيعي مع خرائط عمق الرؤية ومدخلات نموذج المركبة الكهربائية. كما يُحسّن الرادار رباعي الأبعاد بشكل كبير من قدرات النظام على التعميم في المواقف الصعبة ذات النطاق الضيق، مثل التقاطعات الضبابية أو عمليات دمج الطرق السريعة ليلاً.
تطوير الدمج: الانتقال من التطوير القائم على القواعد إلى التطوير القائم على النماذج
بدلاً من الاعتماد على القواعد التي يتم إنشاؤها يدويًا، تتعلم أنظمة المركبات ذاتية القيادة الحديثة بشكل مشترك ميزات متعددة الوسائط باستخدام الشبكات العصبية.
تتمثل مساهمة الرادار رباعي الأبعاد في هذه البنى الاندماجية القائمة على النماذج فيما يلي:
قياسات السرعة والمدى المستقرين
هندسة متينة مستقلة عن الإضاءة
سحابة نقاط منظمة مناسبة للدمج العميق
عادة ما تؤدي هذه السمات إلى زيادة وزن النمط أثناء التدريب، مما يعزز اتساق وموثوقية مخرجات الإدراك.
سيناريوهات تطبيقية مهمة للرادار رباعي الأبعاد
طقس صعب وقاسٍ
يمكن أن يتسبب الضباب الكثيف والإضاءة الخلفية الليلية وانعكاسات المطر في تدهور أنظمة الرؤية.
أصبح الإدراك المستمر في ظروف الرؤية المنخفضة ممكناً بفضل قدرة الرادار رباعي الأبعاد على الحفاظ على مخرجات سحابة النقاط مستقرة نسبياً.
إدراك سريع للأمام
يتطلب اتخاذ القرارات التنبؤية في سيناريوهات الطرق السريعة الكشف الدقيق بعيد المدى وتقدير المسار المبكر.
يتميز رادار رباعي الأبعاد بكفاءته العالية في:
التقاط الأجسام البعيدة والصغيرة
توفير بيانات سرعة سلسة وثابتة
تشجيع الإنذار المبكر أثناء المناورات السريعة
وهذا يجعلها مفيدة بشكل خاص للقيادة بمساعدة الطرق السريعة ونظام المساعدة على الطريق.
مواقف المدن ذات السرعة المنخفضة والمدى القريب
يُعد الكشف الدقيق عن العوائق الثابتة والتفاصيل القريبة ضروريًا لركن السيارات، والتنقل في الطرق الضيقة، والمساعدة في حركة المرور الكثيفة.
يؤدي توفير بيانات هندسية مستقرة ومنظمة بواسطة رادار رباعي الأبعاد إلى تحسين ما يلي:
تحديد هوية الرصيف
تحديد الأشياء على ارتفاعات منخفضة
القدرة على التنبؤ في المواقف المعقدة والبطيئة
تقنية الرادار رباعي الأبعاد ونشر لينبويف
مجموعة منتجات شاملة لتغطية سيناريوهات متعددة
تقدم شركة Linpowave مجموعة واسعة من منتجات الرادار رباعي الأبعاد المناسبة لمختلف سيناريوهات القيادة بفضل خبرتها القوية في تصميم هوائيات MIMO، ونمذجة السحابة النقطية، وخطوط معالجة الإشارات.
سلسلة V300: إدراك المدى البعيد والمتوسط
يستخدم جهاز V300، المصمم للاستشعار الأمامي والجانبي، واجهة إيثرنت لإخراج سحب نقاط منظمة عالية الكثافة. ويتكامل بسهولة مع أنظمة الرؤية لدمج بيانات من عدة مستشعرات، كما يدعم أنظمة L2++ وL3 التي تتطلب بيانات بيئية ذات نطاق ترددي عالٍ.
الاستشعار الحضري متوسط وقصير المدى مع سلسلة U300
يوفر نظام U300 كشفًا موثوقًا للأجسام الصغيرة والثابتة أو القريبة في ظروف القيادة البطيئة والمدى القريب، مثل مواقف السيارات أو أنظمة المساعدة في الازدحام المروري. وهذا يُحسّن التحكم بالمركبة في الأماكن الضيقة والمزدحمة.
تسهل Linpowave تطوير الخوارزميات الفعالة والتكامل السلس مع أطر الدمج الحالية من خلال تزويد المطورين بمجموعات تطوير البرامج (SDKs) ووثائق واضحة لنقاط السحابة وواجهات برمجة التطبيقات (APIs) وسلاسل الأدوات.
نظرة مستقبلية للصناعة: جاهزية الاندماج، وتكلفة مُحسّنة، وقابلية للتوسع
يتزايد استخدام رادار الموجات المليمترية رباعي الأبعاد في المركبات ذات الإنتاج الضخم مع تطور شرائح الرادار وانخفاض تكلفتها. ويُعتبر هذا الرادار تقنية استشعار أساسية لبنى L2++ إلى L3 المستقبلية، وذلك بفضل فعاليته من حيث التكلفة، ومتانته، وتوازن أدائه.
من المتوقع أن يظل الرادار رباعي الأبعاد مكونًا أساسيًا لأنظمة القيادة الذاتية من الجيل التالي نظرًا للتركيز المتزايد على الاستقرار والعمق المنظم.
الأسئلة الشائعة
هل يمكن استبدال تقنية LiDAR برادار الموجات المليمترية رباعي الأبعاد؟
يعمل نظاما LiDAR والرادار رباعي الأبعاد معًا بكفاءة عالية. وبينما يعتمد اعتماد نظام LiDAR على متطلبات النظام والميزانية، يبرز نظام الرؤية مع الرادار رباعي الأبعاد كبنية شائعة واقتصادية.
كيف يعمل رادار رباعي الأبعاد في الأحوال الجوية السيئة؟
في ظروف المطر أو الضباب أو الإضاءة المنخفضة، يحافظ الرادار رباعي الأبعاد عادةً على استقرار أكبر في الاستشعار مقارنةً بالرؤية. ويؤثر كل من السيناريو والتكوين على الأداء.
هل تقدم شركة Linpowave المساعدة في مجال التطوير؟
بالتأكيد. للمساعدة في تطوير نماذج الدمج، توفر Linpowave وثائق شاملة لنقاط السحابة، ومجموعات تطوير البرامج (SDKs)، وواجهات برمجة التطبيقات (APIs)، وسلاسل الأدوات.
هل يُعدّ الرادار رباعي الأبعاد مناسباً لكل من الطرق الحضرية والطرق السريعة؟
بالتأكيد. في حين أن سلسلة U300 تؤدي أداءً جيدًا في المدى القريب، والمناطق الحضرية، والظروف منخفضة السرعة، فإن سلسلة V300 هي الأنسب للرؤية بعيدة المدى وعالية السرعة.