










التغلب على تحديات قياس المدى والسرعة من أجل ملاحة أكثر أمانًا
في عالم اليوم سريع التطور، حيث تنتشر المركبات ذاتية القيادة والطائرات المسيّرة، يُعدّ قياس المدى والسرعة بدقة أمرًا بالغ الأهمية لضمان عمليات آمنة وفعّالة. مع ذلك، تعاني العديد من الأنظمة من بيانات غير موثوقة في بيئات ديناميكية، مما يؤدي إلى مخاطر محتملة كتقدير المسافات أو السرعات بشكل خاطئ. وتتفاقم هذه المشكلة في السيناريوهات المعقدة حيث تتداخل العوامل البيئية مع أجهزة الاستشعار، مما يتسبب في تأخيرات أو أخطاء في اتخاذ القرارات في الوقت الفعلي. لحسن الحظ، يمكن للتقنيات المتقدمة معالجة هذه المشكلات من خلال توفير قياسات دقيقة وموثوقة تُحسّن موثوقية النظام بشكل عام.
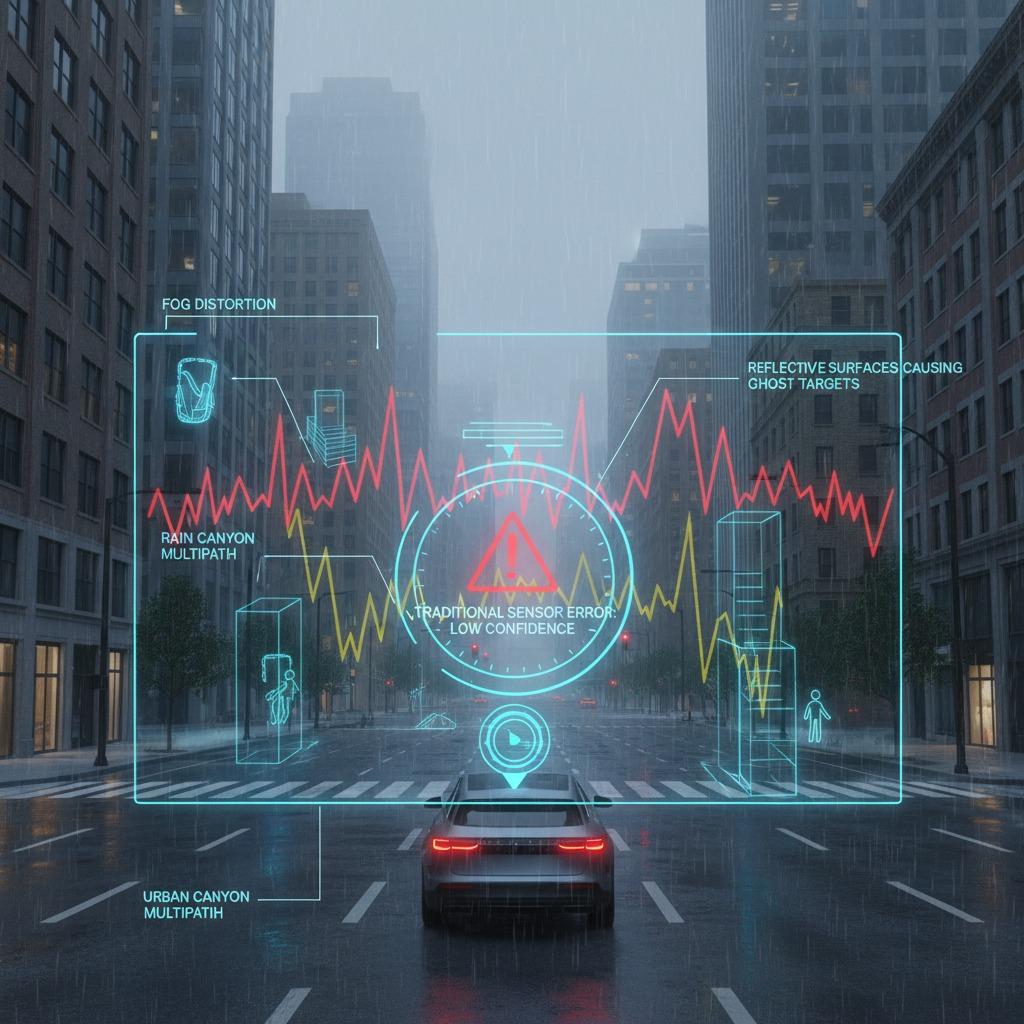
المشكلة: عدم الدقة في البيئات الديناميكية
يُعدّ التعامل مع الظروف المتغيرة، كالأحوال الجوية والتضاريس وازدحام المدن، أحد أبرز التحديات في قياس المدى والسرعة. غالبًا ما تتعطل أجهزة الاستشعار التقليدية، مُقدّمةً قراءات غير متسقة تُؤثر سلبًا على دقة الملاحة. فعلى سبيل المثال، في ظروف الضباب أو المطر، قد تفقد الأنظمة البصرية دقتها، ما يُؤدي إلى تقديرات خاطئة للسرعة وزيادة المخاطر أثناء الحركة. ولا يقتصر هذا التأثير على الأجهزة الفردية فحسب، بل يمتدّ ليشمل تطبيقات أوسع نطاقًا، كإدارة الأساطيل، حيث يُمكن أن تُؤدي الأخطاء المتراكمة إلى توقفات مكلفة أو حوادث. وبدون قياسات موثوقة، يُصبح التكامل السلس مع الأنظمة الأخرى شبه مستحيل، ما يُبرز الحاجة إلى حلول أكثر مرونة.
الحل: دمج تقنيات الاستشعار البيئي لتحسين الدقة
للتصدي لهذه الأخطاء، يُمثل دمج الاستشعار البيئي في أنظمة قياس المدى والسرعة نهجًا ثوريًا. فمن خلال دمج البيانات من أجهزة استشعار متعددة، مثل الليدار والرادار وأجهزة الموجات فوق الصوتية، تُنشئ هذه الحلول خريطة بيئية شاملة تُراعي متغيرات مثل الرطوبة والعوائق. وتضمن هذه الاستراتيجية متعددة المستشعرات دقة بيانات السرعة والمدى حتى في الظروف الصعبة، مما يدعم آليات تجنب الاصطدام بشكل مباشر. فعلى سبيل المثال، يُمكن للاستشعار البيئي في الوقت الفعلي رصد التغيرات الطفيفة في كثافة الهواء أو انعكاسات الأسطح، مما يسمح للأنظمة بتعديل القياسات ديناميكيًا ومنع الأخطاء التي قد تؤدي إلى الاصطدامات.
تطوير الملاحة الدقيقة واكتشاف العوائق
انطلاقًا من هذا الأساس، تبرز الملاحة الدقيقة كميزة رئيسية عند دمج قياس المدى والسرعة بدقة عالية مع خوارزميات متطورة. تعالج هذه الأدوات البيانات المُستشعرة لرسم مسارات دقيقة، مما يُمكّن المركبات أو الروبوتات من التنقل في المساحات الضيقة بثقة. في السيناريوهات التي تتطلب دقة عالية، مثل طائرات التوصيل بدون طيار في المدن، يُتيح دمج خاصية اكتشاف العوائق مع تتبع السرعة إمكانية المناورة الاستباقية حول العوائق غير المتوقعة. تُحلل حلول مثل منصات الدمج المدعومة بالذكاء الاصطناعي بيانات المدى جنبًا إلى جنب مع المدخلات البيئية للتنبؤ بالتهديدات المحتملة، مما يُقلل من زمن الاستجابة ويُحسّن أوقات الاستجابة. هذا لا يُقلل من مخاطر الاصطدام فحسب، بل يُحسّن أيضًا من استخدام الطاقة عن طريق تجنب الالتفافات غير الضرورية.
التطبيقات العملية والإمكانات المستقبلية
أثبت تطبيق هذه الحلول المتكاملة أثره التحويلي في مختلف القطاعات. ففي مجال القيادة الذاتية، أدى تحسين قياس المدى والسرعة عبر الاستشعار البيئي إلى تحسين دقة الملاحة بنسبة 30%، كما أظهرت الاختبارات الميدانية الأخيرة. أما في العمليات البحرية والجوية، فتستفيد أنظمة تجنب الاصطدام بشكل كبير من الكشف الدقيق عن العوائق، مما يتيح مسارات أكثر أمانًا في المجال الجوي المزدحم. وبالنظر إلى المستقبل، ستساهم التطورات المستمرة في تصغير حجم أجهزة الاستشعار والتعلم الآلي في تحسين هذه التقنيات، مما يجعلها متاحة للأجهزة الاستهلاكية. ومن خلال معالجة المشكلات الأساسية المتعلقة بموثوقية القياس، تمهد هذه الابتكارات الطريق لمستقبل تُعد فيه الحركة السلسة والخالية من المخاطر هي القاعدة. وفي نهاية المطاف، يضمن الاستثمار في مثل هذه المناهج الشاملة ليس فقط الامتثال لمعايير السلامة، بل أيضًا اكتساب ميزة تنافسية في عالم يزداد فيه الاعتماد على الأتمتة.