










أهمية تجزئة المشهد في عمليات الرادار والاستشعار
أصبح مصطلح "تقسيم المشهد" شائعًا جدًا بمجرد أن ينتقل برنامج الاستشعار من مرحلة التجارب المعملية إلى بيئة حقيقية. ببساطة، هو عملية تقسيم مشهد الاستشعار إلى مناطق ذات دلالة، ليتمكن النظام من تفسير ما يحدث في كل منطقة. قد يبدو هذا المصطلح نظريًا، لكن الأمر يصبح أكثر تعقيدًا عندما تعمل كمهندس وتحاول الحفاظ على استقرار الرادار في حركة المرور، أو عبر الأشجار، أو بالقرب من الآلات، أو في منطقة صناعية مزدحمة. عندها يصبح السؤال عمليًا: كيف تفصل الأهداف المهمة عن أنشطة الخلفية دون فقدان الكثير من التفاصيل؟
بالنسبة لفرق تطوير المنتجات، تؤثر الإجابة على أداء النظام، وحمل الحوسبة، وحجم العمليات المنطقية اللاحقة اللازمة للتصنيف أو التتبع. أما بالنسبة لمديري التوريد، فغالباً ما تُغير مزيج المكونات والتوازن المقبول بين التكلفة والقدرات. فالمستشعر الذي يرصد "شيئاً ما" لا يكفي إن لم يتمكن من فصل المشهد بشكل كافٍ للتطبيق اللاحق.
التحدي الأساسي: المزيد من التفاصيل يعني عادةً المزيد من التشويش
نقطة الضغط في العديد من أنظمة الاستشعار واحدة. أنت ترغب في دقة مكانية أفضل حتى لا تتداخل الأجسام القريبة، ولكن الدقة الأعلى تعني أيضاً أن النظام يرى المزيد من التشويش، والمزيد من البنية الزائفة، والمزيد من الحركة الظاهرية. وهذا يجعل عملية التجزئة أصعب، لا أسهل.
يصدق هذا بشكل خاص في التطبيقات القائمة على الرادار، حيث يمكن لكبح التشويش تحديد ما إذا كانت المخرجات مفيدة أم مجرد بيانات مشوشة. قد تهيمن انعكاسات الخلفية من الجدران والأرضيات والأسطح الرطبة والناقلات أو المركبات على الإشارة المرتدة. يساعد أسلوب التجزئة الجيد النظام على عزل أجزاء المشهد المهمة، بدلاً من إجبار كل خوارزمية لاحقة على فرز نفس سحابة النقاط الفوضوية أو خريطة المدى-دوبلر.
تنبيه عملي: يقلل العديد من المشاريع من شأن التغيرات التي تطرأ على البيئة بعد النشر. فمنطقة الاختبار الخاضعة للرقابة تختلف عن خط الإنتاج الفعلي، حتى لو كانت الأجهزة متطابقة.
ما هي عملية تقسيم المشهد التي تساعد النظام على اتخاذ القرار؟
على مستوى عالٍ، يدعم تقسيم المشهد ثلاثة قرارات مهمة للمهندسين والمشترين على حد سواء.
يساعد ذلك في تحديد مواقع الأشياء. هذه هي الوظيفة الأكثر وضوحاً، لكنها مجرد البداية.
يساعد ذلك في فصل فئات الأجسام أو أنماط حركتها. في بعض التطبيقات، يمكن أن تضيف بصمة دوبلر الدقيقة أدلة مفيدة حول كيفية تحرك الجسم، سواء كان يدور أو يمشي أو يهتز أو يمر ببساطة عبر مجال الرؤية.
يساعد ذلك في الحفاظ على استمرارية التتبع عند ظهور عدة أجسام معًا. وهنا يصبح تتبع الأهداف المتعددة أكثر موثوقية، لأن جهاز التتبع لا يتعرض باستمرار للارتباك بسبب عمليات الكشف المدمجة أو العوائد المتداخلة.
الأساليب الشائعة ومكان ملاءمتها
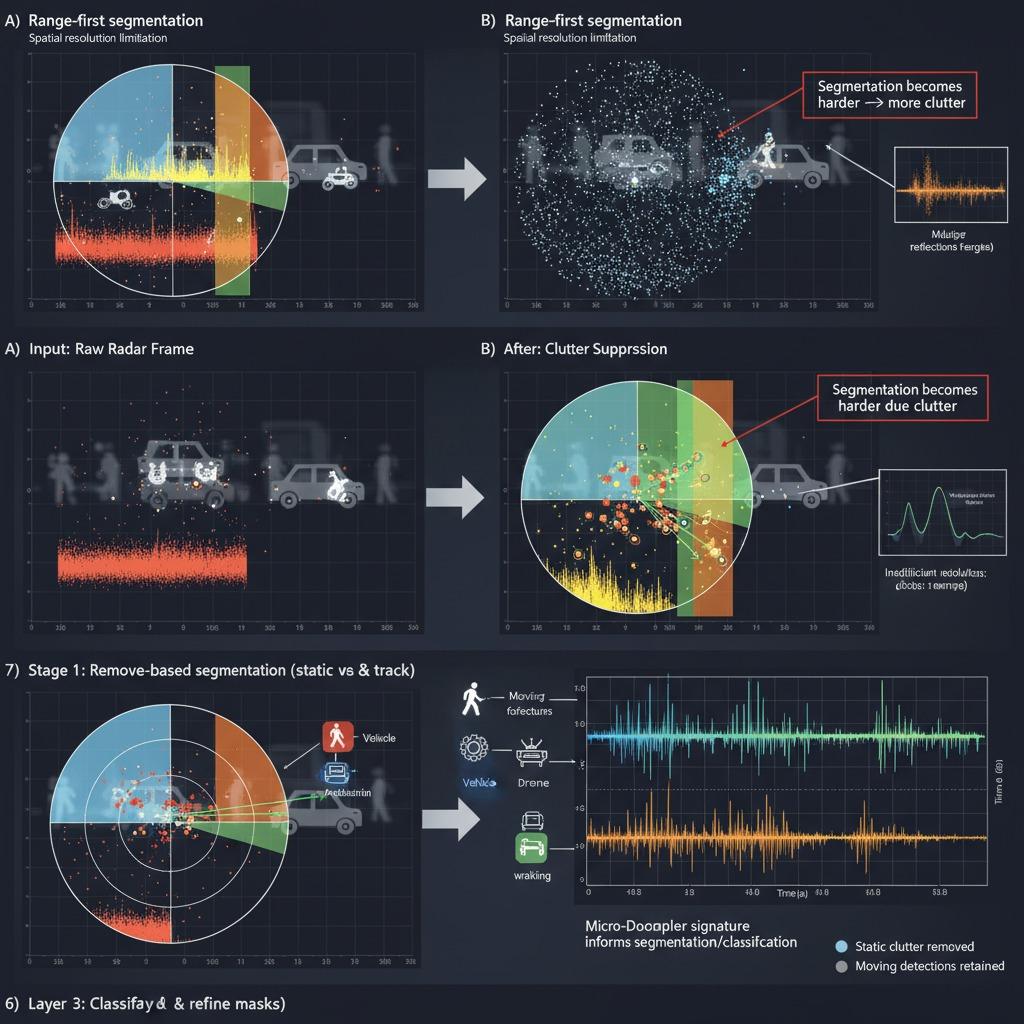
تجزئة النطاق أولاً
يُعدّ التجزئة القائمة على المدى الخيار الأبسط في كثير من الأحيان عندما يكون هناك فصل كافٍ بين الأهداف والخلفية في المشهد. ويُحقق هذا الأسلوب أفضل النتائج عندما تتوزع الأجسام على مسافات مختلفة وتكون الدقة المكانية للنظام كافية. أما عيبه فهو واضح: إذا كان المشهد كثيفًا، فقد لا يكون المدى وحده كافيًا.
التجزئة القائمة على الحركة والميزات
عندما يُشكّل التشويش الثابت مشكلةً رئيسية، يُمكن الاستعانة بإشارات الحركة. في أنظمة الرادار، قد يتضمن ذلك فصل الهياكل الثابتة عن الأجسام المتحركة، ثم تحسين النتيجة باستخدام تحليل الخصائص. يُمكن لهذا أن يُحسّن من كبح التشويش، ولكنه قد يزيد أيضًا من متطلبات البرمجيات.
الأساليب الهجينة
في العديد من التطبيقات العملية، لا يكمن الحل الأمثل في طريقة واحدة، بل في طريقة متعددة الطبقات. تبدأ العملية الأولى بإزالة عناصر الخلفية الواضحة، ثم تستخدم العملية الثانية خصائص الحركة أو الشكل أو الميزات لتحسين المشهد. غالبًا ما تُعوّض هذه الخطوة الإضافية تكلفتها عندما يكون المشهد مزدحمًا أو عندما يحتاج النظام إلى مخرجات ثابتة في ظل ظروف متغيرة.
معايير اختيار المهندسين وفرق التوريد
إذا كنت تقوم بتقييم منصة استشعار أو مسار تجزئة، فاطرح بعض الأسئلة المباشرة.
ما مدى ثباته عند تغيير الخلفية؟
ما مقدار الدقة المكانية المطلوبة فعلياً للأشياء التي تهمك؟
هل يمكنه فصل الأجسام المتقاربة دون إدخال فواصل خاطئة مفرطة؟
هل يحتفظ بمعلومات كافية لتتبع الأهداف المتعددة في المراحل اللاحقة؟
ما مقدار الحوسبة التي يتطلبها ذلك، وهل هذا مقبول على الحافة؟
تكتسب هذه الأسئلة أهمية بالغة لأن التجزئة ليست مجرد ميزة برمجية، بل إنها تُشكّل بنية النظام بأكمله. وقد تحتاج الخوارزمية الأكثر كفاءة إلى جودة بيانات أمامية أفضل، أو توقيت أدق، أو ذاكرة أكبر مما كان متوقعًا في قائمة المكونات الأصلية.
أخطاء شائعة تُبطئ المشاريع
من الأخطاء الشائعة افتراض أن المصنف القوي سيُصلح التجزئة الضعيفة. عادةً لا يفعل ذلك. إذا لم يتم فصل المشهد بشكل واضح أولاً، فإن المصنف سيرث التشويش.
خطأ آخر هو ضبط النظام لسيناريو اختبار واحد فقط. قد يبدو ذلك جيدًا في العرض التوضيحي، لكنه يفشل تمامًا عند النشر. عادةً ما يدرك المهندسون هذا الأمر بالفطرة؛ لكن المشكلة تكمن في أن ضغط الجدول الزمني قد يدفعهم إلى تجاهل هذه المشكلة.
ثمة مشكلة ثالثة تتمثل في تجاهل عملية إزالة التشويش حتى وقت متأخر من البرنامج. وبحلول ذلك الوقت، قد يكون الفريق قد التزم بالفعل بوضع المستشعرات، أو تصميم الحاوية، أو أجهزة المعالجة، مما يجعل عملية التنظيف صعبة.
نصائح للمشترين: ما الذي يجب طلبه قبل الالتزام؟
اطلب أدلةً على كيفية عمل النظام في مشاهد تُحاكي حالة استخدامك الفعلية، وليس فقط لقطات مُنمّقة من المختبر. إذا كان التطبيق يتضمن بيئات كثيفة، فاطلب رؤية كيفية تعامله مع الأجسام المتداخلة وانعكاسات الخلفية. إذا كانت حالة الاستخدام تعتمد على تحليل الحركة، فراجع ما إذا كانت بصمة دوبلر الدقيقة قابلة للاستخدام في الظروف التي تهمك.
من المفيد أيضاً طلب شرح واضح لما تقوم به عملية تجزئة الصورة في كل مرحلة. إذا لم يتمكن المورّد من شرح كيفية تقسيم المشهد، فقد يكون النظام أكثر هشاشة مما يبدو.
التعليمات
هل يُستخدم تجزئة المشهد في الرادار فقط؟
لا، بل يُستخدم في أنظمة الاستشعار والرؤية. يطرح الرادار تحديات خاصة لأن فصل التشويش عن الحركة قد يكون صعباً، لكن الفكرة الأساسية أوسع من ذلك.
هل يؤدي تحسين الدقة المكانية دائمًا إلى تحسين عملية التجزئة؟
ليس تلقائيًا. قد تكشف الدقة المكانية العالية عن تفاصيل أكثر، ولكنها قد تزيد أيضًا من التعقيد والتشويش. يعتمد المستوى المفيد على التطبيق.
ما هي أهم نتائج التجزئة؟
اتخاذ قرارات موثوقة في المراحل اللاحقة. إذا ساعد التجزئة النظام على اكتشاف الأشياء أو تصنيفها أو تتبعها بشكل أكثر اتساقًا، فإنه يؤدي وظيفته.
الخطوة العملية التالية
إذا كنت تقارن بين خيارات الاستشعار أو تراجع تصميمًا قائمًا، فابدأ بالمشهد نفسه. ارسم خريطة للخلفية، وكثافة الأهداف، وأنماط الحركة، ومستوى التشويش المتوقع. ثم اختبر ما إذا كان أسلوب التجزئة لا يزال فعالًا في ظروف أقل تنظيمًا من بيئة العرض التوضيحي. غالبًا ما توفر هذه الخطوة وحدها الكثير من وقت الهندسة لاحقًا.