










Why scene segmentation matters in radar and sensing workflows
Scene segmentation is becoming one of those terms that shows up everywhere once a sensing program moves past lab demonstrations and into a real environment. In simple terms, it is the process of dividing a sensor scene into meaningful regions so the system can interpret what is happening in each one. That sounds academic until you are the engineer trying to keep a radar stable in traffic, through foliage, near machinery, or in a crowded industrial bay. Then it becomes a practical question: how do you separate usable targets from background activity without losing too much detail?
For product teams, the answer affects system performance, compute load, and how much downstream logic is needed for classification or tracking. For sourcing managers, it often changes the component mix and the acceptable tradeoff between cost and capability. A sensor that sees “something” is not enough if it cannot separate the scene well enough for the application that follows.
The core challenge: more detail usually means more noise
The pressure point in many sensing systems is the same. You want better spatial resolution so nearby objects do not blur together, but higher resolution also means the system sees more clutter, more false structure, and more apparent motion. That makes segmentation harder, not easier.
This is especially true in radar-based applications, where clutter suppression can determine whether the output is useful or merely busy. Background reflections from walls, floors, wet surfaces, conveyors, or vehicles can dominate the return. A good segmentation approach helps the system isolate the parts of the scene that matter, rather than forcing every downstream algorithm to sort through the same messy point cloud or range-Doppler map.
A practical caution: many projects underestimate how much the environment changes after deployment. A controlled test area and a live production line are not the same scene, even if the hardware is identical.
What scene segmentation helps the system decide
At a high level, scene segmentation supports three decisions that matter to engineers and buyers alike.
It helps identify where the objects are. That is the most obvious function, but it is only the start.
It helps separate object classes or motion patterns. In some applications, a micro-Doppler signature can add useful clues about how an object is moving, whether it is rotating, walking, vibrating, or simply passing through the field of view.
It helps preserve track continuity when multiple objects appear together. That is where multi-target tracking becomes much more reliable, because the tracker is not constantly being confused by merged detections or overlapping returns.
Common approaches and where they fit
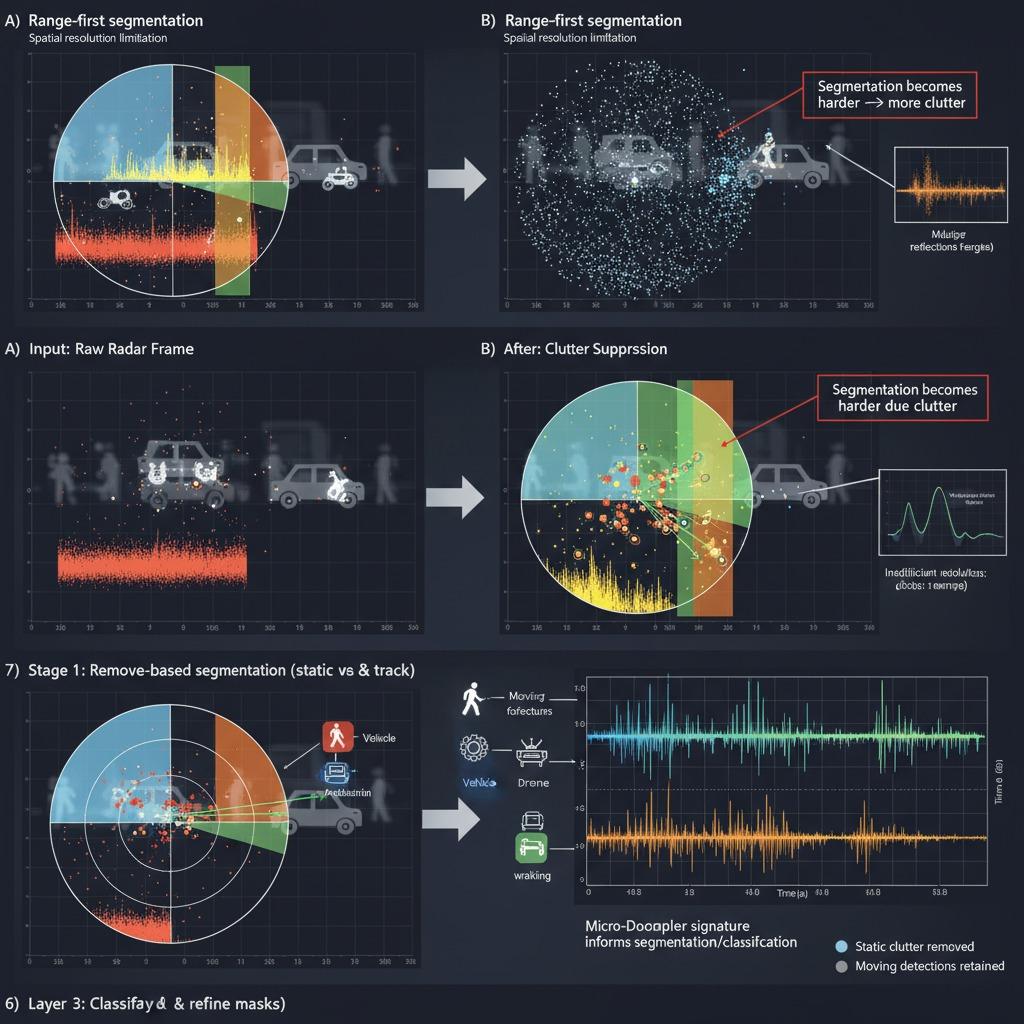
Range-first segmentation
Range-based segmentation is often the simplest path when the scene has enough separation between targets and background. It works best when objects are distributed at different distances and the system’s spatial resolution is adequate for the job. The downside is obvious: if the scene is dense, range alone may not be enough.
Motion and feature-based segmentation
When stationary clutter is a major problem, motion cues can help. In radar systems, this may involve separating static structures from moving objects and then refining the result with feature analysis. That can improve clutter suppression, though it can also make the software stack more demanding.
Hybrid approaches
In many real deployments, the best answer is not a single method but a layered one. A first pass removes obvious background elements, then a second pass uses motion, shape, or feature signatures to refine the scene. That extra step often pays for itself when the scene is busy or when the system needs stable output across changing conditions.
Selection criteria for engineers and sourcing teams
If you are evaluating a sensing platform or a segmentation pipeline, ask a few direct questions.
How well does it hold up when the background changes?
How much spatial resolution is actually needed for the objects you care about?
Can it separate close objects without introducing excessive false splits?
Does it preserve enough information for multi-target tracking downstream?
How much compute does it require, and is that acceptable at the edge?
These questions matter because segmentation is not just a software feature. It shapes the entire system architecture. A more capable algorithm may need better front-end data quality, tighter timing, or more memory than the original bill of materials anticipated.
Common mistakes that slow projects down
One common mistake is assuming that a strong classifier will fix poor segmentation. Usually it won’t. If the scene is not cleanly separated first, the classifier inherits the confusion.
Another mistake is tuning the system only for one test scenario. That can look good in a demo and fail quietly in deployment. Engineers tend to know this instinctively; the trouble is that schedule pressure can push the issue to the side.
A third problem is ignoring clutter suppression until late in the program. By then, the team may already have committed to sensor placement, enclosure design, or processing hardware that makes cleanup difficult.
Buyer advice: what to request before you commit
Ask for evidence of how the system behaves in scenes that resemble your actual use case, not just polished lab footage. If the application involves dense environments, ask to see how it handles overlapping objects and background reflections. If the use case depends on movement analysis, review whether the micro-Doppler signature is usable in the conditions you care about.
It also helps to request a clear explanation of what the segmentation pipeline is doing at each stage. If the vendor cannot explain how the scene is partitioned, the system may be more fragile than it looks.
FAQ
Is scene segmentation only used in radar?
No. It is used across sensing and vision systems. Radar brings special challenges because clutter and motion can be difficult to separate, but the basic idea is broader.
Does better spatial resolution always improve segmentation?
Not automatically. Higher spatial resolution can reveal more detail, but it can also increase complexity and clutter. The useful level depends on the application.
What is the most important outcome of segmentation?
Reliable downstream decisions. If segmentation helps the system detect, classify, or track objects more consistently, it is doing its job.
Practical next step
If you are comparing sensing options or reviewing an existing design, start with the scene itself. Map the background, the target density, the motion patterns, and the level of clutter you actually expect. Then test whether the segmentation approach still works when conditions are less tidy than the demo environment. That one step often saves a great deal of engineering time later.