









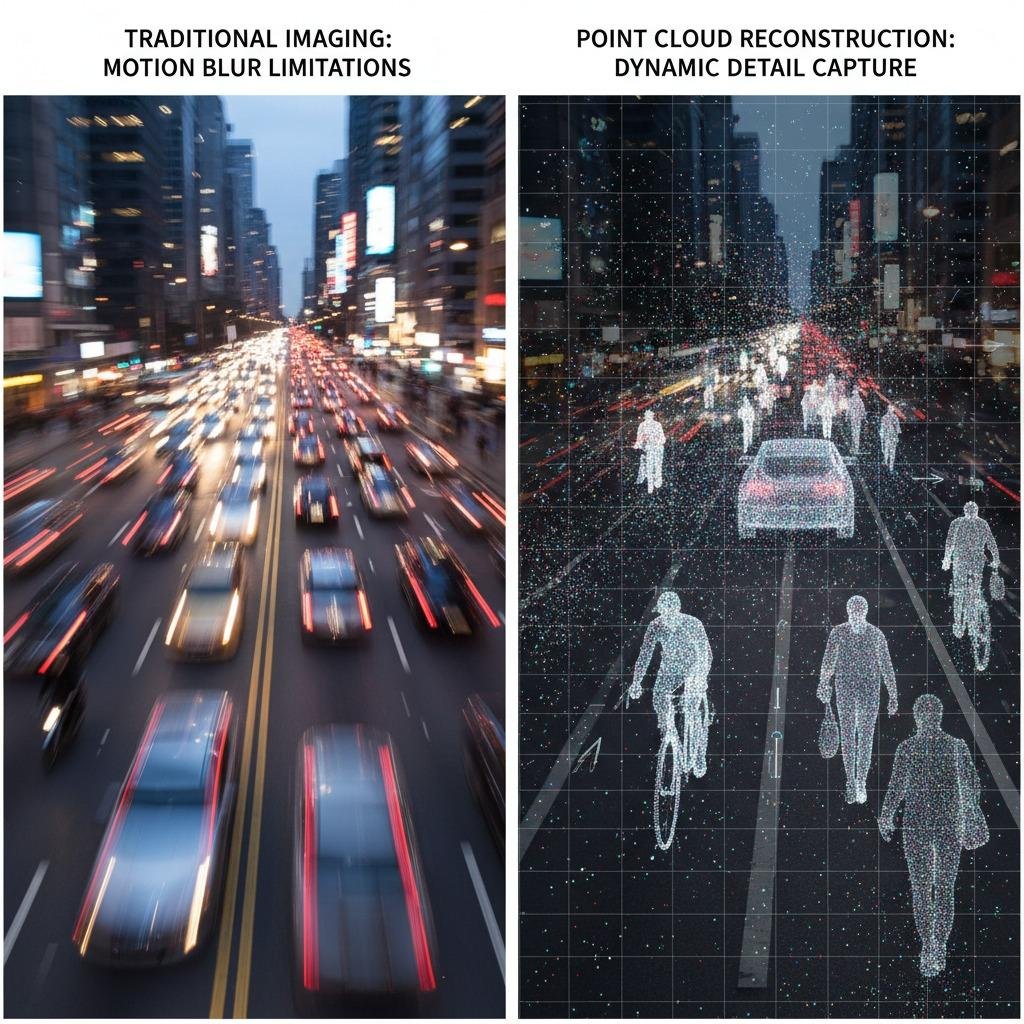
Challenges in Capturing Dynamic Environments
In the fast-paced world of autonomous systems and robotics, one of the biggest hurdles is accurately capturing and interpreting dynamic environments. Traditional imaging methods often fall short when dealing with moving objects, leading to incomplete data and unreliable decision-making. Point cloud reconstruction emerges as a critical technology here, enabling the creation of detailed 3D models from scattered data points. However, without proper integration of advanced techniques, issues like motion blur and sparse coverage persist, making it difficult to achieve real-time precision in applications such as self-driving vehicles or surveillance drones.
Integrating Micro-Doppler Analysis for Enhanced Motion Detection
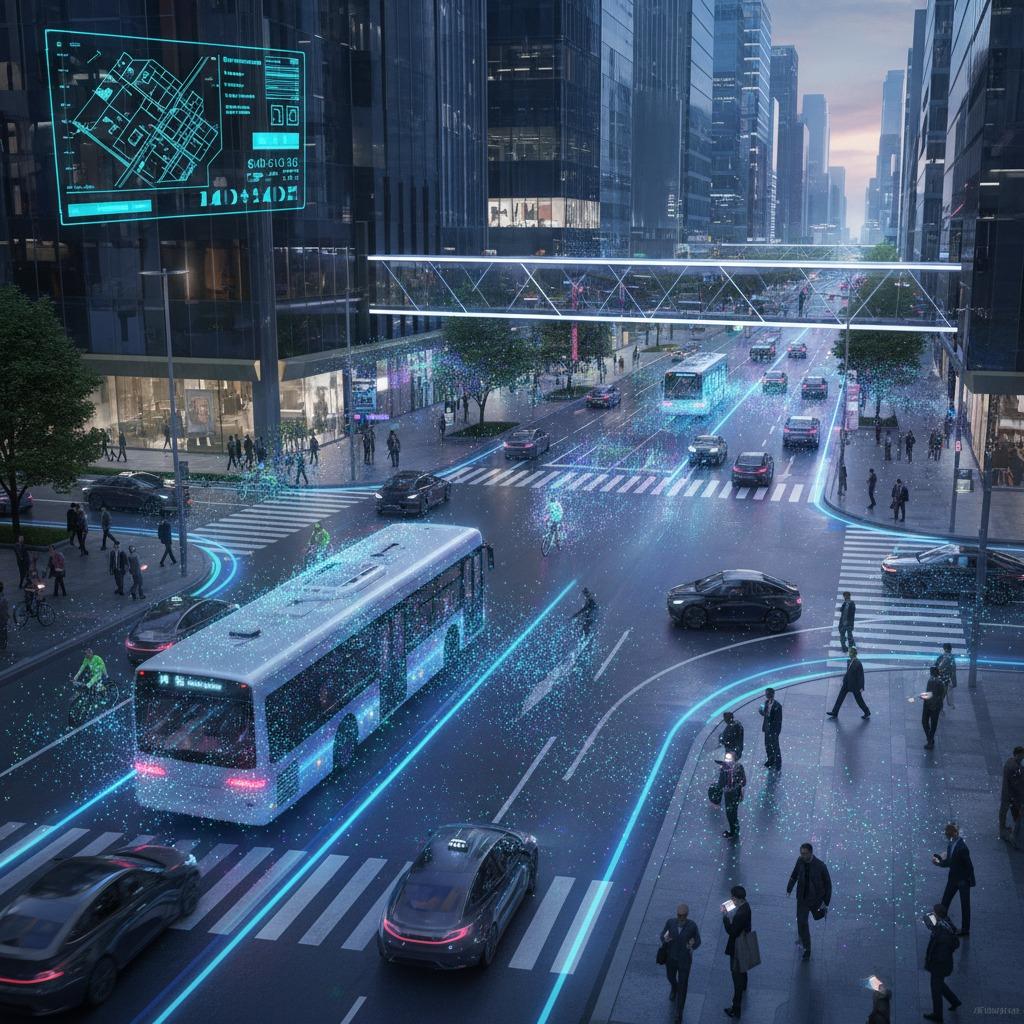
To address the limitations in dynamic scene capture, incorporating micro-Doppler analysis into point cloud reconstruction offers a powerful solution. Micro-Doppler analysis focuses on the subtle frequency shifts caused by moving parts of objects, such as rotating blades on a drone or limbs of a pedestrian. By fusing this radar-based insight with point cloud data, systems can better differentiate between static and moving elements, reducing false positives in reconstruction processes. For instance, in urban settings, this integration allows for more accurate modeling of traffic flows, where traditional point cloud reconstruction alone might overlook rapid changes in object trajectories. This approach not only improves the density and quality of the reconstructed point clouds but also enhances overall system robustness against environmental noise.
Leveraging Dynamic Object Tracking for Real-Time Reconstruction
Another key challenge in point cloud reconstruction is maintaining continuity when tracking objects in motion across frames. Dynamic object tracking solves this by employing algorithms that predict and update object positions using velocity and acceleration data. When combined with point cloud reconstruction, it ensures that 3D maps evolve seamlessly as objects move, preventing gaps in the data stream. Consider a warehouse robot navigating cluttered aisles: without dynamic tracking, reconstructed point clouds could misrepresent shifting inventory, leading to collisions. By implementing predictive tracking models, such as Kalman filters optimized for 3D data, the reconstruction process becomes more adaptive, delivering high-fidelity models that support safer and more efficient operations.
Overcoming Obstacles with Detection and Ranging Techniques
Obstacle detection and ranging present yet another pain point, especially in unstructured environments where surprises like sudden debris or wildlife can disrupt operations. Point cloud reconstruction, when enhanced with LiDAR or radar ranging, provides the depth perception needed to identify and map these obstacles accurately. The solution lies in multi-sensor fusion, where ranging data refines the point clouds to highlight potential hazards in real time. For example, in agricultural robotics, this method can reconstruct field layouts while detecting moving animals, allowing machines to adjust paths dynamically. By prioritizing obstacle detection and ranging within the reconstruction pipeline, systems achieve greater reliability, minimizing downtime and operational risks.
Achieving Comprehensive 3D Environmental Mapping
Finally, the ultimate goal of addressing these challenges is to enable robust 3D environmental mapping, which ties all elements together for a holistic view. Point cloud reconstruction serves as the backbone, but integrating micro-Doppler analysis, dynamic object tracking, and obstacle detection and ranging creates a synergistic effect. This comprehensive approach transforms raw sensor data into actionable 3D maps that adapt to changes on the fly. In search-and-rescue scenarios, for instance, drones equipped with these technologies can reconstruct disaster zones, track survivors' movements via micro-Doppler signatures, and avoid obstacles through precise ranging. The result is a scalable solution that not only solves immediate reconstruction problems but also paves the way for advanced AI-driven autonomy, ensuring safer and more effective navigation in complex, real-world settings.
By adopting these integrated strategies, industries can overcome the pitfalls of incomplete or outdated environmental data, unlocking the full potential of point cloud reconstruction for innovative applications.