









Introducción: Hay un nuevo punto de inflexión en la tecnología de la percepción
La conducción asistida tradicional está dando paso a sistemas de conducción autónoma más sofisticados y bien coordinados. Este cambio genera nuevas exigencias en la percepción, en particular en su capacidad para proporcionar una comprensión consistente, organizada y fiable de entornos complejos. Los sistemas basados únicamente en visión aún se enfrentan a retos en condiciones reales de la carretera, como la niebla, la lluvia, las luces de fondo nocturnas, los viaductos multicapa y los obstáculos estáticos de baja altura. El radar 3D de ondas milimétricas convencional, por otro lado, también presenta limitaciones, ya que no puede medir la elevación.
En vista de esto, el radar de ondas milimétricas 4D se está convirtiendo en una tecnología de detección fundamental que mejora la percepción de profundidad, fortalece la comprensión espacial y mantiene un rendimiento fiable en diversas circunstancias ambientales. Cubre las deficiencias causadas por el deterioro de otros sensores y ofrece datos estructurados de alto valor, consistentes con los modelos de percepción basados en transformadores y vehículos eléctricos de batería (BEV).
En este artículo se examinan la importancia tecnológica del radar 4D mmWave, su función en los sistemas de fusión de sensores de próxima generación, escenarios de aplicación importantes y la implementación realista de Linpowave en varios niveles de conducción autónoma.
Avance tecnológico del radar de ondas milimétricas 4D
Representación espacial mejorada para un conocimiento 3D preciso
El radar convencional de ondas milimétricas tiene una capacidad limitada para identificar estructuras verticales, ya que suele proporcionar datos de distancia, velocidad y ángulo azimutal. Por ello, las situaciones con rampas, viaductos, obstáculos de baja altura o tráfico con múltiples capas pueden ser difíciles.
Al agregar elevación (ángulo de inclinación), el radar 4D mmWave amplía la detección espacial y permite una interpretación 3D más completa del entorno.
Esta mejora permite a los coches autónomos distinguir entre:
Tráfico en niveles elevados y de superficie
Conos de tráfico, bordillos de carreteras y otros elementos de baja altura
Topología de la carretera y pendientes ascendentes y descendentes
Los módulos de planificación y control reciben información de mayor calidad a partir de datos más estructurados, lo que conduce a un comportamiento del vehículo más estable y predecible en una variedad de situaciones.
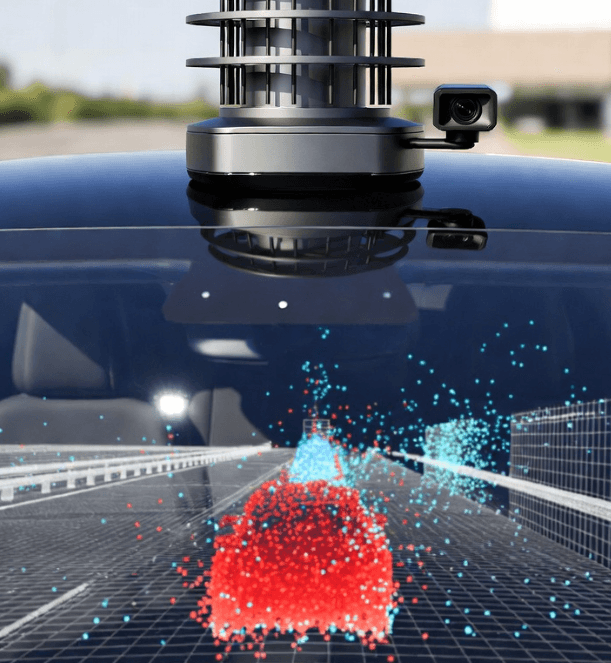
Expresión geométrica más rica mediante una nube de puntos de alta densidad
El radar 4D de ondas milimétricas produce nubes de puntos densas y organizadas mediante sofisticados conjuntos de antenas MIMO y canales de procesamiento de señales optimizados. Estos resultados proporcionan suficiente detalle espacial para describir los contornos, las formas y los patrones de movimiento de los objetos, aunque no son tan densos como los del LiDAR.
Este grado de riqueza geométrica fomenta:
Comprensión semántica y modelado del entorno más fiables
Rendimiento constante en condiciones climáticas adversas o de poca luz.
Priores de profundidad mejorados para modelos de aprendizaje profundo basados en BEV
El radar 4D puede seguir proporcionando datos fiables y útiles en situaciones en las que los sistemas visuales se deterioran, como en situaciones de lluvia intensa o contraluz.
La creciente importancia del radar 4D en la fusión multisensorial
"Sensor central" en contraposición a "Sensor de apoyo"
En el pasado, el radar mmWave funcionaba principalmente como un sensor de apoyo, que ofrecía información complementaria sobre velocidad y distancia para apoyar la visión. El radar 4D se está volviendo cada vez más esencial para las pilas de percepción a medida que la industria migra a L2++ y L3, lo que aumenta la necesidad de redundancia y detección de profundidad estructurada.
Fusion es más coherente y más simple de optimizar debido a su formato de nube de puntos, que se alinea naturalmente con los mapas de profundidad de visión y las entradas del modelo BEV. El radar 4D mejora enormemente las capacidades de generalización del sistema en situaciones desafiantes de cola larga, como intersecciones con niebla o incorporaciones de carreteras durante la noche.
Desarrollo de fusión: transición del desarrollo basado en reglas al desarrollo basado en modelos
En lugar de depender de reglas creadas manualmente, las pilas de AV modernas aprenden conjuntamente características multimodales utilizando redes neuronales.
La contribución del radar 4D a estas arquitecturas de fusión basadas en modelos es:
Mediciones de velocidad estable y alcance
Geometría robusta independiente de la iluminación.
Una nube de puntos estructurada que es apropiada para la fusión profunda
Estos rasgos generalmente conducen a un mayor peso de modalidad durante el entrenamiento, lo que mejora la consistencia y confiabilidad de los resultados de percepción.
Escenarios importantes de aplicación del radar 4D
Clima difícil y severo
La niebla intensa, la luz de fondo nocturna y los reflejos de la lluvia pueden provocar el deterioro de los sistemas de visión.
La percepción continua en condiciones de baja visibilidad es posible gracias a la capacidad del radar 4D de mantener salidas de nubes de puntos comparativamente estables.
Percepción de alta velocidad de avance
La toma de decisiones predictivas en escenarios de carreteras requiere una detección precisa de largo alcance y una estimación temprana de la trayectoria.
El radar 4D es excelente en:
Capturar objetos distantes y diminutos
Proporcionar datos de velocidad constantes y uniformes
Fomentar la alerta temprana durante maniobras rápidas
Esto lo hace especialmente útil para la conducción asistida en autopista y NOA.
Situaciones urbanas de baja velocidad y corta distancia
La detección precisa de obstáculos estáticos y detalles de corto alcance es necesaria para estacionar, navegar en carreteras estrechas y brindar asistencia en tráfico pesado.
Los datos geométricos estables y organizados proporcionados por el radar 4D mejoran:
Identificación de acera
Identificación de objetos a baja altura
Previsibilidad en situaciones de complejidad y lentitud
La tecnología de radar 4D y el despliegue de Linpowave
Una cartera de productos integral para cubrir múltiples escenarios
Linpowave ofrece una amplia gama de productos de radar 4D adecuados para diversos escenarios de conducción gracias a su sólida experiencia en diseño de antenas MIMO, modelado de nubes de puntos y canales de procesamiento de señales.
Serie V300: Percepción de largo y medio alcance
El V300, diseñado para detección frontal y lateral, utiliza una interfaz Ethernet para generar nubes de puntos estructuradas de alta densidad. Se integra fácilmente con sistemas de visión para la fusión multisensor y es compatible con sistemas L2++ y L3 que requieren datos ambientales de alto ancho de banda.
Detección urbana de mediano y corto alcance con la serie U300
El U300 ofrece una detección fiable de objetos pequeños, estacionarios o de corto alcance en situaciones de baja velocidad y corto alcance, como la asistencia de estacionamiento o en atascos (TJA). Esto mejora el control del vehículo en espacios reducidos y ciudades concurridas.
Linpowave facilita el desarrollo efectivo de algoritmos y la integración perfecta con los marcos de fusión actuales al proporcionar a los desarrolladores SDK, documentación clara de nubes de puntos, API y cadenas de herramientas.
Perspectiva de la industria: preparada para la fusión, con costos optimizados y escalable
El radar 4D mmWave se está utilizando cada vez más en vehículos de consumo masivo a medida que los chipsets de radar avanzan y la estructura de costos mejora. Se posiciona como una tecnología de detección crucial para las futuras arquitecturas L2++ a L3 gracias a su rentabilidad, robustez y equilibrio de rendimiento.
Se espera que el radar 4D siga siendo un componente crucial de los sistemas de conducción autónoma de próxima generación debido al creciente énfasis en la estabilidad y la profundidad estructurada.
Preguntas frecuentes
¿Se puede sustituir el LiDAR por un radar mmWave 4D?
El LiDAR y el radar 4D funcionan bien juntos. Si bien la adopción del LiDAR depende de los requisitos del sistema y del presupuesto, la Visión + Radar 4D se está consolidando como una arquitectura popular y económica.
¿Cómo funciona el radar 4D en condiciones climáticas adversas?
En condiciones de lluvia, niebla o poca luz, el radar 4D suele mantener una detección más estable que la visión. El escenario y la configuración influyen en el rendimiento.
¿Linpowave ofrece asistencia para el desarrollo?
Por supuesto. Para facilitar el desarrollo de modelos de fusión, Linpowave proporciona documentación completa de nubes de puntos, SDK, API y cadenas de herramientas.
¿El radar 4D es apropiado tanto para carreteras urbanas como para autopistas?
Claro. Si bien la serie U300 ofrece un buen rendimiento en situaciones de corto alcance, urbanas y a baja velocidad, la serie V300 es más adecuada para la percepción a larga distancia y alta velocidad.