



Superación de los desafíos en la segmentación de escenas para aplicaciones de radar avanzadas
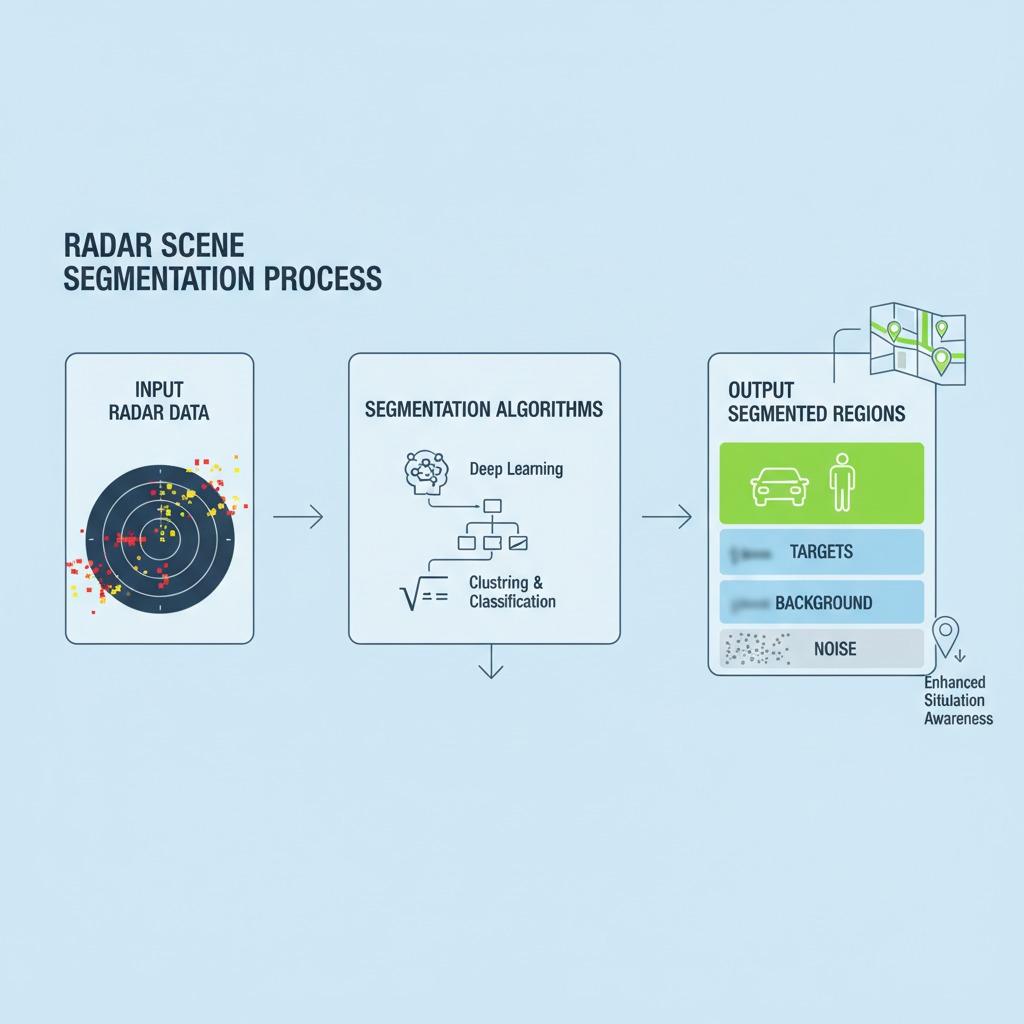
En el campo del procesamiento de señales de radar , la segmentación de escenas se presenta como una técnica fundamental para dividir con precisión una escena de radar en regiones significativas, como la distinción entre objetivos, fondo y ruido. Sin embargo, los profesionales suelen enfrentarse a importantes obstáculos, como la baja resolución espacial que difumina los límites de los objetos, la interferencia de las firmas micro-Doppler que complica el análisis de movimiento, el ruido persistente que enmascara las señales débiles y las dificultades en el seguimiento de múltiples objetivos cuando varios objetos se superponen o se mueven de forma impredecible. Estos problemas pueden dar lugar a interpretaciones inexactas, una menor fiabilidad del sistema e ineficiencias en aplicaciones como la conducción autónoma, la vigilancia y los sistemas de defensa. Abordar la segmentación de escenas de forma eficaz requiere enfoques innovadores que mejoren la precisión y la robustez.
Mejora de la resolución espacial para una segmentación de escenas más nítida.
Uno de los principales desafíos en la segmentación de escenas es la limitada resolución espacial de los sistemas de radar, que a menudo resulta en características fusionadas o poco definidas dentro de la escena. Este problema dificulta la capacidad de aislar elementos individuales con precisión. Para solucionarlo, se pueden emplear algoritmos avanzados de superresolución, como los que utilizan redes neuronales de aprendizaje profundo, para reconstruir detalles más finos a partir de datos de radar de baja resolución. Al interpolar la información faltante y realzar los bordes, estos métodos mejoran la resolución espacial sin necesidad de actualizar el hardware. Por ejemplo, la integración de técnicas de procesamiento de señales dispersas permite una mejor delimitación de los componentes de la escena, lo que hace que la segmentación sea más fiable. Además, los enfoques híbridos que combinan el radar con sensores complementarios como el LiDAR pueden aumentar aún más la resolución, asegurando que incluso en entornos densos, la segmentación produzca mapas espaciales precisos que faciliten tareas posteriores como la detección de objetos.
Mitigación de las firmas micro-Doppler y el ruido en escenas dinámicas
Las firmas micro-Doppler, que surgen de las vibraciones o rotaciones sutiles de los objetos en movimiento, introducen una variabilidad que altera la segmentación de escenas tradicional al crear artefactos espectrales. Junto con los desafíos de la supresión de ruido ambiental —donde los ecos ambientales enmascaran las señales del objetivo—, esto conduce a falsos positivos y errores de segmentación. Una solución práctica implica técnicas de filtrado adaptativo diseñadas para la extracción de firmas micro-Doppler, como el análisis tiempo-frecuencia mediante transformadas wavelet para separar estas firmas de los desplazamientos Doppler principales. Para la supresión de ruido ambiental, los algoritmos de procesamiento adaptativo espacio-temporal (STAP) destacan por estimar y restar dinámicamente la covarianza del ruido ambiental, preservando la integridad del objetivo. Estos métodos no solo refinan la segmentación de escenas al aislar elementos dinámicos, sino que también mejoran la relación señal-ruido general, lo que permite que los sistemas funcionen de manera robusta en entornos urbanos o forestales con mucho ruido ambiental.
Optimización del seguimiento de múltiples objetivos mediante una segmentación mejorada.
El seguimiento de múltiples objetivos plantea un problema formidable para la segmentación de escenas, ya que las trayectorias superpuestas y las señales de radar similares suelen causar errores de asociación, lo que conlleva la pérdida de seguimientos o identificaciones erróneas. Esto se ve agravado por los problemas mencionados anteriormente de resolución espacial y ruido. Las soluciones eficaces incluyen filtros de asociación de datos probabilísticos integrados con los procesos de segmentación, que asignan probabilidades a las posibles coincidencias entre objetivos y escenas, resolviendo así las ambigüedades en tiempo real. Además, el uso de modelos basados en grafos para la segmentación de escenas permite modelar las interacciones entre objetivos, utilizando nodos para los objetos detectados y aristas para las restricciones relacionales derivadas de las predicciones de movimiento. Al incorporar bucles de retroalimentación de las salidas de seguimiento para refinar los límites de la segmentación, estas técnicas logran una mayor precisión en escenarios con múltiples objetivos. En la práctica, los marcos de aprendizaje automático entrenados con diversos conjuntos de datos pueden aprender a gestionar oclusiones y movimientos no lineales, lo que garantiza un seguimiento impecable incluso en entornos de alta densidad.
Al abordar estos desafíos fundamentales —limitaciones de resolución espacial, interferencias de firma micro-Doppler, necesidad de supresión de ruido y complejidades en el seguimiento de múltiples objetivos— mediante soluciones algorítmicas específicas, la segmentación de escenas deja de ser un obstáculo para convertirse en un potente facilitador de las tecnologías de radar de próxima generación. La implementación de estas estrategias no solo mejora el rendimiento, sino que también abre las puertas a aplicaciones más seguras y eficientes en diversos sectores.