









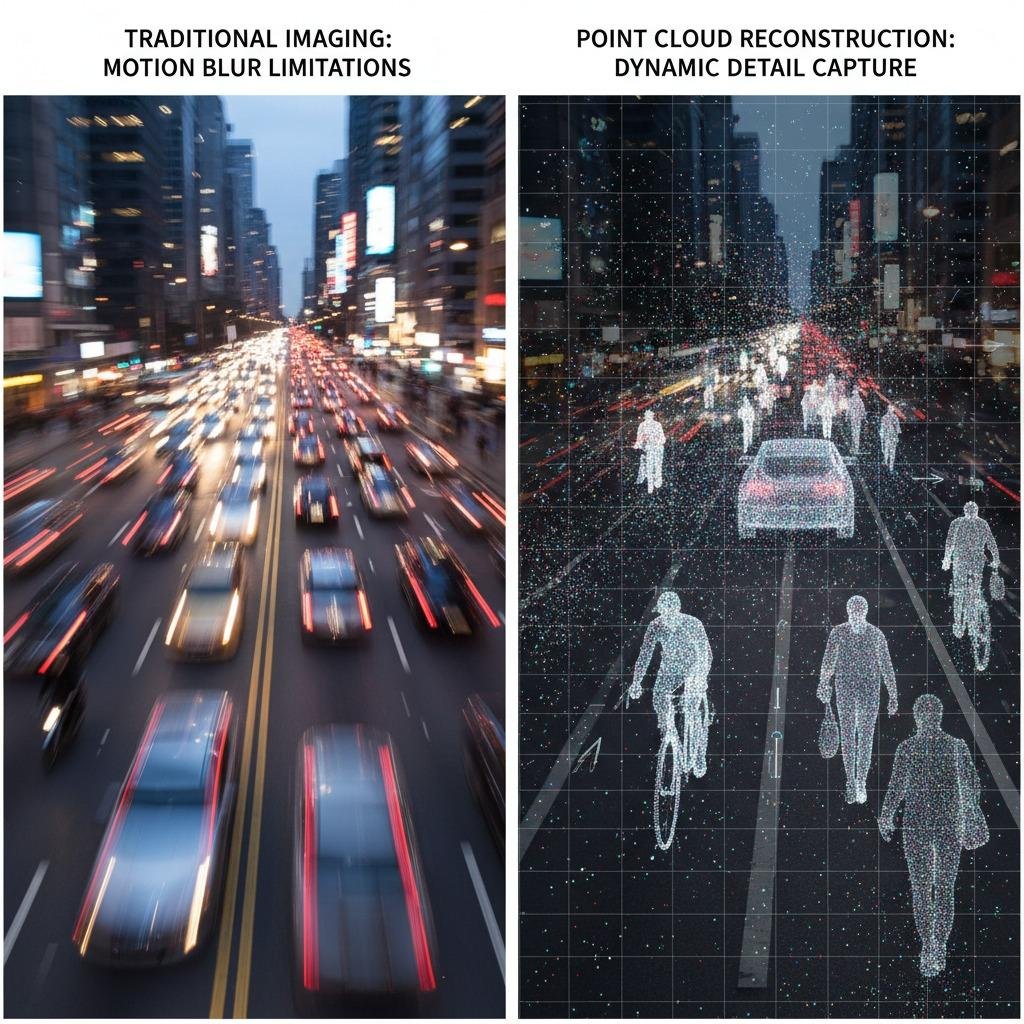
Desafíos en la captura de entornos dinámicos
En el vertiginoso mundo de los sistemas autónomos y la robótica, uno de los mayores desafíos es capturar e interpretar con precisión entornos dinámicos. Los métodos de imagen tradicionales suelen ser insuficientes al trabajar con objetos en movimiento, lo que genera datos incompletos y una toma de decisiones poco fiable. La reconstrucción de nubes de puntos se presenta como una tecnología crucial, ya que permite crear modelos 3D detallados a partir de puntos de datos dispersos. Sin embargo, sin una integración adecuada de técnicas avanzadas, persisten problemas como el desenfoque por movimiento y la cobertura escasa, lo que dificulta lograr precisión en tiempo real en aplicaciones como vehículos autónomos o drones de vigilancia.
Integración del análisis micro-Doppler para una mejor detección del movimiento.
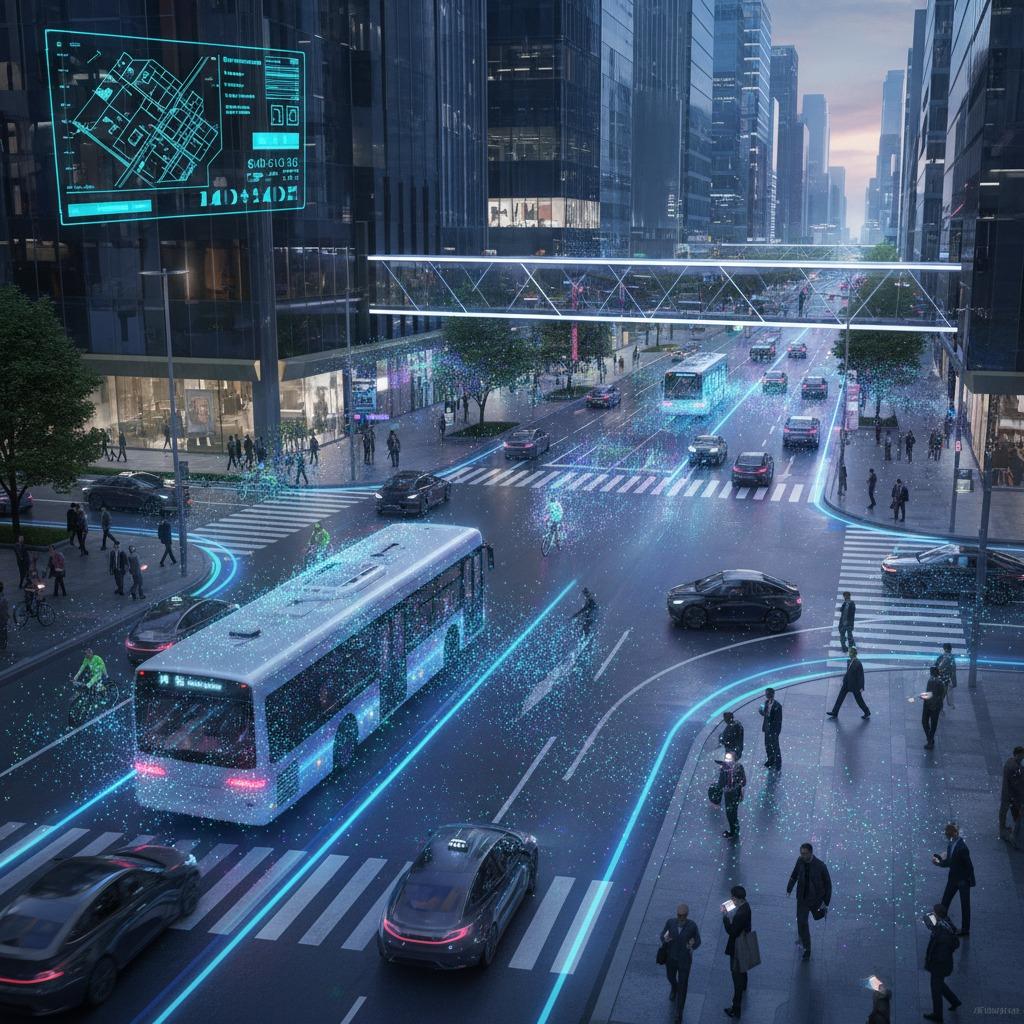
Para superar las limitaciones en la captura de escenas dinámicas, la incorporación del análisis micro-Doppler a la reconstrucción de nubes de puntos ofrece una solución eficaz. El análisis micro-Doppler se centra en los sutiles cambios de frecuencia causados por las partes móviles de los objetos, como las hélices giratorias de un dron o las extremidades de un peatón. Al combinar esta información basada en radar con los datos de la nube de puntos, los sistemas pueden diferenciar mejor entre elementos estáticos y en movimiento, reduciendo los falsos positivos en los procesos de reconstrucción. Por ejemplo, en entornos urbanos, esta integración permite un modelado más preciso de los flujos de tráfico, donde la reconstrucción tradicional de nubes de puntos por sí sola podría pasar por alto cambios rápidos en las trayectorias de los objetos. Este enfoque no solo mejora la densidad y la calidad de las nubes de puntos reconstruidas, sino que también aumenta la robustez general del sistema frente al ruido ambiental.
Aprovechamiento del seguimiento dinámico de objetos para la reconstrucción en tiempo real.
Otro desafío clave en la reconstrucción de nubes de puntos es mantener la continuidad al rastrear objetos en movimiento a través de fotogramas. El seguimiento dinámico de objetos resuelve este problema mediante algoritmos que predicen y actualizan las posiciones de los objetos utilizando datos de velocidad y aceleración. Al combinarse con la reconstrucción de nubes de puntos, garantiza que los mapas 3D evolucionen sin interrupciones a medida que los objetos se mueven, evitando lagunas en el flujo de datos. Consideremos un robot de almacén navegando por pasillos abarrotados: sin seguimiento dinámico, las nubes de puntos reconstruidas podrían representar erróneamente el inventario cambiante, lo que provocaría colisiones. Al implementar modelos de seguimiento predictivo, como los filtros de Kalman optimizados para datos 3D, el proceso de reconstrucción se vuelve más adaptable, ofreciendo modelos de alta fidelidad que permiten operaciones más seguras y eficientes.
Superación de obstáculos en técnicas de detección y medición de distancias
La detección y medición de obstáculos representa otro punto crítico, especialmente en entornos no estructurados donde imprevistos como escombros o animales salvajes pueden interrumpir las operaciones. La reconstrucción de nubes de puntos, al mejorarse con datos LiDAR o de radar, proporciona la percepción de profundidad necesaria para identificar y mapear estos obstáculos con precisión. La solución reside en la fusión multisensorial, donde los datos de medición refinan las nubes de puntos para resaltar posibles peligros en tiempo real. Por ejemplo, en robótica agrícola, este método puede reconstruir la distribución de los campos mientras detecta animales en movimiento, lo que permite a las máquinas ajustar sus trayectorias dinámicamente. Al priorizar la detección y medición de obstáculos dentro del proceso de reconstrucción, los sistemas logran una mayor fiabilidad, minimizando el tiempo de inactividad y los riesgos operativos.
Cómo lograr un mapeo ambiental 3D integral
Finalmente, el objetivo principal para abordar estos desafíos es lograr un mapeo ambiental 3D robusto, que integre todos los elementos para obtener una visión holística. La reconstrucción de nubes de puntos constituye la base, pero la integración del análisis micro-Doppler, el seguimiento dinámico de objetos y la detección y medición de obstáculos genera un efecto sinérgico. Este enfoque integral transforma los datos brutos de los sensores en mapas 3D procesables que se adaptan a los cambios en tiempo real. En escenarios de búsqueda y rescate, por ejemplo, los drones equipados con estas tecnologías pueden reconstruir zonas de desastre, rastrear los movimientos de los supervivientes mediante firmas micro-Doppler y evitar obstáculos mediante mediciones precisas. El resultado es una solución escalable que no solo resuelve problemas de reconstrucción inmediatos, sino que también allana el camino para una autonomía avanzada impulsada por IA, garantizando una navegación más segura y eficaz en entornos complejos del mundo real.
Al adoptar estas estrategias integradas, las industrias pueden superar los inconvenientes de los datos ambientales incompletos o desactualizados, liberando todo el potencial de la reconstrucción de nubes de puntos para aplicaciones innovadoras.