










Por qué la segmentación de escenas es importante en los flujos de trabajo de radar y detección
La segmentación de escenas se está convirtiendo en un término recurrente una vez que un programa de detección trasciende las demostraciones de laboratorio y se implementa en un entorno real. En términos sencillos, consiste en dividir la escena capturada por un sensor en regiones significativas para que el sistema pueda interpretar lo que sucede en cada una. Esto puede sonar teórico hasta que uno se convierte en el ingeniero que intenta mantener estable un radar en medio del tráfico, entre la vegetación, cerca de maquinaria o en una zona industrial concurrida. Entonces surge una cuestión práctica: ¿cómo separar los objetivos útiles de la actividad de fondo sin perder demasiado detalle?
Para los equipos de producto, la respuesta afecta el rendimiento del sistema, la carga computacional y la cantidad de lógica necesaria para la clasificación o el seguimiento. Para los responsables de compras, suele modificar la combinación de componentes y el equilibrio aceptable entre coste y funcionalidad. Un sensor que detecta "algo" no es suficiente si no puede diferenciar la escena adecuadamente para la aplicación posterior.
El principal desafío: más detalles suelen significar más ruido.
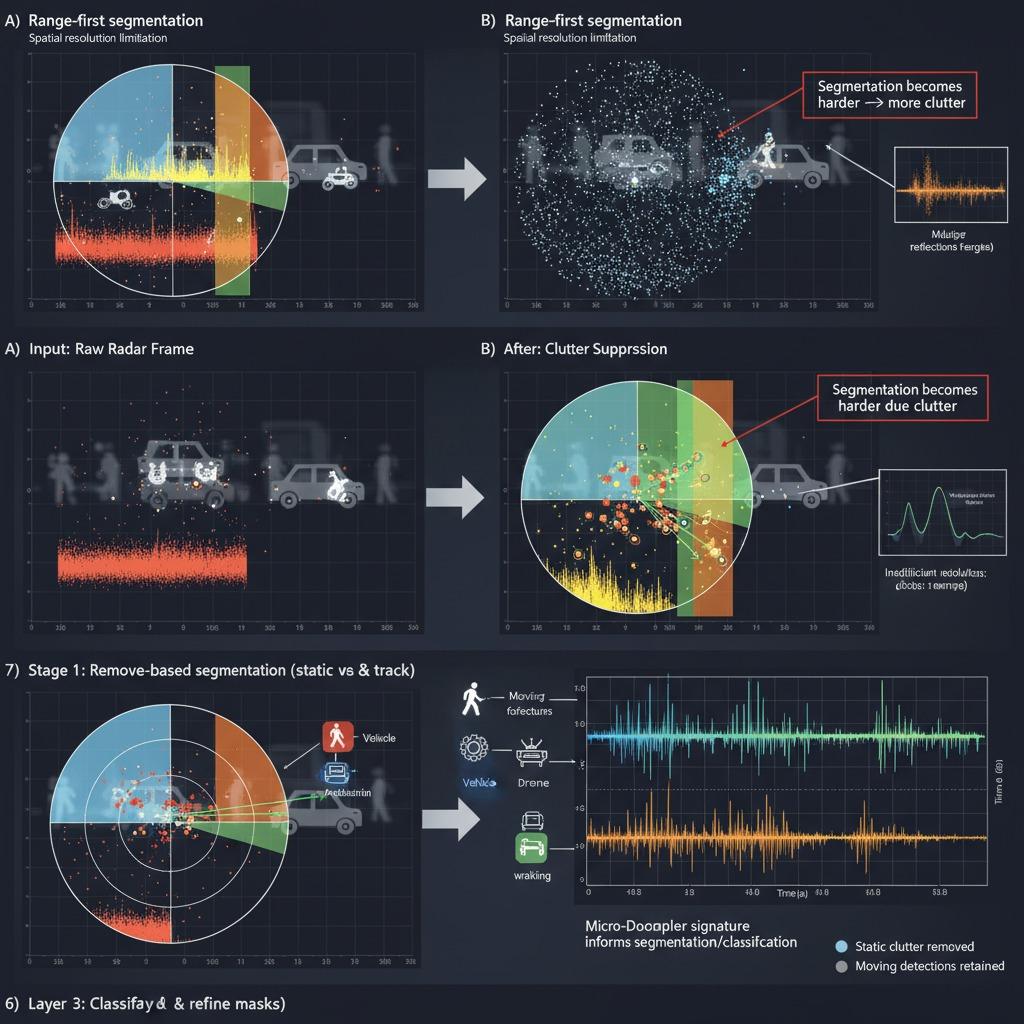
El punto crítico en muchos sistemas de detección es el mismo. Se busca una mejor resolución espacial para que los objetos cercanos no se confundan, pero una mayor resolución también implica que el sistema detecte más interferencias, estructuras falsas y movimientos aparentes. Esto dificulta la segmentación, en lugar de facilitarla.
Esto es especialmente cierto en aplicaciones basadas en radar, donde la supresión de interferencias puede determinar si la señal de salida es útil o simplemente confusa. Los reflejos de fondo de paredes, suelos, superficies mojadas, cintas transportadoras o vehículos pueden dominar la señal de retorno. Un buen método de segmentación ayuda al sistema a aislar las partes relevantes de la escena, en lugar de obligar a cada algoritmo posterior a procesar la misma nube de puntos o mapa de rango-Doppler desordenado.
Una advertencia práctica: muchos proyectos subestiman cuánto cambia el entorno después de la implementación. Un área de pruebas controlada y una línea de producción en funcionamiento no son lo mismo, incluso si el hardware es idéntico.
¿Qué segmentación de escena ayuda al sistema a decidir?
En términos generales, la segmentación de escenas respalda tres decisiones importantes tanto para ingenieros como para compradores.
Ayuda a identificar dónde se encuentran los objetos. Esa es la función más obvia, pero es solo el comienzo.
Ayuda a diferenciar clases de objetos o patrones de movimiento. En algunas aplicaciones, una firma micro-Doppler puede aportar información útil sobre cómo se mueve un objeto, ya sea girando, caminando, vibrando o simplemente pasando por el campo de visión.
Esto ayuda a preservar la continuidad del seguimiento cuando aparecen varios objetos juntos. Es ahí donde el seguimiento de múltiples objetivos se vuelve mucho más fiable, ya que el sistema de seguimiento no se confunde constantemente con detecciones fusionadas o retornos superpuestos.
Enfoques comunes y dónde encajan
Segmentación basada en el rango
La segmentación basada en rangos suele ser la opción más sencilla cuando la escena presenta suficiente separación entre los objetos y el fondo. Funciona mejor cuando los objetos se distribuyen a diferentes distancias y la resolución espacial del sistema es adecuada. La desventaja es evidente: si la escena es densa, el rango por sí solo puede no ser suficiente.
Segmentación basada en movimiento y características
Cuando el ruido estático representa un problema importante, las señales de movimiento pueden ser de gran ayuda. En los sistemas de radar, esto puede implicar separar las estructuras estáticas de los objetos en movimiento y, posteriormente, refinar el resultado mediante el análisis de características. Esto puede mejorar la supresión del ruido, aunque también puede aumentar la complejidad del software.
Enfoques híbridos
En muchas implementaciones reales, la mejor solución no es un método único, sino uno por capas. Una primera pasada elimina los elementos de fondo obvios, y una segunda pasada utiliza firmas de movimiento, forma o características para refinar la escena. Este paso adicional suele ser rentable cuando la escena es compleja o cuando el sistema necesita una salida estable en condiciones cambiantes.
Criterios de selección para ingenieros y equipos de abastecimiento
Si está evaluando una plataforma de sensores o un sistema de segmentación, hágase algunas preguntas directas.
¿Qué tan bien se comporta cuando cambia el fondo?
¿Cuánta resolución espacial se necesita realmente para los objetos que le interesan?
¿Puede separar objetos cercanos sin introducir un exceso de divisiones falsas?
¿Conserva suficiente información para el seguimiento posterior de múltiples objetivos?
¿Cuánta capacidad de procesamiento requiere y es eso aceptable en el borde de la red?
Estas preguntas son importantes porque la segmentación no es solo una función de software. Da forma a toda la arquitectura del sistema. Un algoritmo más potente podría requerir una mejor calidad de datos de entrada, una sincronización más precisa o más memoria de la prevista en la lista de materiales original.
Errores comunes que ralentizan los proyectos
Un error común es suponer que un clasificador potente corregirá una segmentación deficiente. Por lo general, no lo hará. Si la escena no se separa correctamente de antemano, el clasificador hereda la confusión.
Otro error común es ajustar el sistema para un único escenario de prueba. Esto puede verse bien en una demostración, pero fallar silenciosamente durante la implementación. Los ingenieros suelen saberlo instintivamente; el problema es que la presión de los plazos puede hacer que se deje de lado.
Un tercer problema es ignorar la supresión de interferencias hasta etapas avanzadas del programa. Para entonces, es posible que el equipo ya haya decidido la ubicación de los sensores, el diseño de la carcasa o el hardware de procesamiento, lo que dificulta la limpieza posterior.
Consejos para el comprador: qué solicitar antes de comprometerse
Solicita pruebas del comportamiento del sistema en escenas similares a tu caso de uso real, no solo en grabaciones de laboratorio. Si la aplicación implica entornos complejos, pide ver cómo gestiona los objetos superpuestos y los reflejos del fondo. Si el caso de uso depende del análisis de movimiento, comprueba si la firma micro-Doppler es utilizable en las condiciones que te interesan.
También es útil solicitar una explicación clara de lo que hace el proceso de segmentación en cada etapa. Si el proveedor no puede explicar cómo se divide la escena, el sistema podría ser más frágil de lo que parece.
Preguntas frecuentes
¿La segmentación de escenas solo se utiliza en radares?
No. Se utiliza en sistemas de detección y visión. El radar presenta desafíos particulares porque el ruido y el movimiento pueden ser difíciles de separar, pero la idea básica es más amplia.
¿Una mejor resolución espacial siempre mejora la segmentación?
No automáticamente. Una mayor resolución espacial puede revelar más detalles, pero también puede aumentar la complejidad y el desorden. El nivel útil depende de la aplicación.
¿Cuál es el resultado más importante de la segmentación?
Decisiones posteriores fiables. Si la segmentación ayuda al sistema a detectar, clasificar o rastrear objetos de forma más consistente, está cumpliendo su función.
Próximo paso práctico
Si está comparando opciones de detección o revisando un diseño existente, comience por la escena en sí. Analice el fondo, la densidad de objetivos, los patrones de movimiento y el nivel de desorden que espera. Luego, compruebe si el método de segmentación sigue funcionando en condiciones menos ordenadas que en el entorno de demostración. Este paso suele ahorrar mucho tiempo de ingeniería posteriormente.