









はじめに:認識技術に新たな転換点が到来
従来の運転支援システムは、より高度で協調性に優れた自動運転システムへと移行しつつあります。この変化は、認識能力、特に複雑な環境を一貫性、体系性、そして信頼性をもって把握する能力に対する新たな要求を生み出しています。視覚のみのシステムは、霧、雨、夜間の逆光、多層構造の高架橋、低高度の静的障害物といった現実世界の道路状況への対応において、依然として課題を抱えています。一方、従来の3Dミリ波レーダーは、高度を測定できないという制約を抱えています。
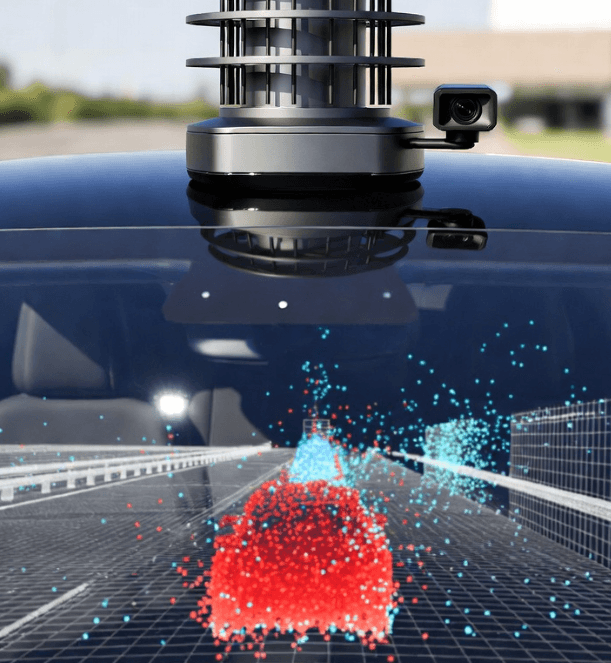
こうした状況を踏まえ、4Dミリ波レーダーは、奥行き知覚の向上、空間把握の強化、そして様々な環境下における信頼性の高い性能の維持を実現する基盤的なセンシング技術となりつつあります。劣化が進む他のセンサーの性能ギャップを埋め、最新の変圧器およびBEVベースの認識モデルと整合性のある、価値の高い構造化データを提供します。
この記事では、4D mmWave レーダーの技術的意義、次世代センサー融合システムにおけるその機能、重要な応用シナリオ、そしてさまざまな自律運転レベルにわたる Linpowave の現実的な展開についてすべて検討します。
4D mmWaveレーダーの技術的進歩
正確な3D知識のための空間表現の改善
従来のミリ波レーダーは、通常、距離、速度、方位角を出力するため、垂直構造物の識別能力には限界があります。そのため、ランプ、高架橋、低高度の障害物、あるいは多層構造の交通が存在する状況では、識別が困難になる可能性があります。
4D mmWave レーダーは、仰角 (ピッチ角) を追加することで空間センシングを拡大し、周囲のより徹底した 3D 解釈を可能にします。
この改良により、自動運転車は以下のものを区別できるようになります。
高架および地上レベルの交通
交通コーン、道路脇の縁石、その他の低いもの
道路の地形と上り坂と下り坂
計画および制御モジュールは、より構造化されたデータから高品質の入力を受け取り、さまざまな状況でより安定した予測可能な車両の動作を実現します。
高密度点群によるより豊かな幾何学的表現
4Dミリ波レーダーは、高度なMIMOアンテナアレイと合理化された信号処理パイプラインを活用し、高密度で整理された点群を生成します。これらの出力は、LiDARほど高密度ではありませんが、物体の輪郭、形状、動きのパターンを記述するのに十分な空間詳細を提供します。
この程度の幾何学的豊かさは次のようなことを促します。
より信頼性の高い意味理解と環境モデリング
低照度や悪天候でも安定したパフォーマンス
BEVに基づく深層学習モデルのための強化された深度事前分布
4D レーダーは、大雨や逆光など視覚システムが低下する状況でも、信頼性が高く有用なデータを提供し続けることができます。
マルチセンサー融合における4Dレーダーの重要性の高まり
「コアセンサー」と「サポートセンサー」
これまで、mmWave レーダーは主に補助センサーとして機能し、視覚をサポートするための補足的な速度と距離の情報を提供していました。業界が L2++ および L3 に移行し、冗長性と構造化された深度センシングの必要性が高まるにつれて、4D レーダーは認識スタックにとってますます重要になっています。
Fusion は、ビジョン深度マップと BEV モデル入力に自然に一致するポイント クラウド形式を採用しているため、一貫性が高く、最適化が簡単です。4D レーダーにより、霧の深い交差点や夜間の高速道路の合流など、困難なロングテール状況でのシステムの一般化機能が大幅に向上します。
Fusion 開発: ルールベースからモデルベースへの移行
最新の AV スタックは、手動で作成されたルールに依存するのではなく、ニューラル ネットワークを使用してマルチモーダル機能を共同で学習します。
これらのモデルベースの融合アーキテクチャに対する 4D レーダーの貢献は次のとおりです。
安定した速度と範囲の測定
照明に依存しない頑丈な形状
ディープフュージョンに適した構造化された点群
これらの特性により、通常、トレーニング中にモダリティの重みが高まり、知覚出力の一貫性と信頼性が向上します。
重要な4Dレーダーアプリケーションシナリオ
困難で厳しい天候
濃霧、夜間の逆光、雨の反射などにより、視覚システムが劣化する可能性があります。
4D レーダーは比較的安定したポイント クラウド出力を維持できるため、視界が悪い状況でも継続的な認識が可能になります。
高速前方認識
高速道路での予測的な意思決定には、正確な長距離検出と早期の軌道推定が必要です。
4Dレーダーは以下の点で優れています:
遠くの小さな物体を捉える
滑らかで一定の速度データの提供
高速操縦中の早期警告の奨励
これは高速道路での運転支援や NOA に特に役立ちます。
低速・近距離の市街地状況
駐車、狭い道路でのナビゲーション、交通渋滞の支援には、静的障害物と近距離の詳細を正確に検出する必要があります。
4D レーダーによって提供される安定した整理された幾何学的データにより、次の点が改善されます。
縁石の識別
低い高度にある物体の識別
複雑で低速な状況における予測可能性
Linpowaveの4Dレーダー技術と展開
多様なシナリオに対応する包括的な製品ポートフォリオ
Linpowave は、MIMO アンテナ設計、ポイント クラウド モデリング、信号処理パイプラインに関する強力な専門知識を活かして、さまざまな運転シナリオに適した幅広い 4D レーダー製品を提供しています。
V300シリーズ:長距離と中距離の認識
V300は前方および側面のセンシングを目的とし、イーサネットインターフェースを介して高密度構造化点群を出力します。マルチセンサーフュージョンのためのビジョンシステムとのインターフェースが容易で、高帯域幅の環境データを必要とするL2++およびL3システムをサポートします。
U300シリーズによる中・短距離都市センシング
U300は、駐車や渋滞支援(TJA)といった低速かつ近距離の状況において、小型、静止、または近距離の物体を確実に検知します。これにより、狭い空間、狭い場所、そして混雑した都市における車両制御が向上します。
Linpowave は、開発者に SDK、明確なポイント クラウド ドキュメント、API、ツールチェーンを提供することで、効果的なアルゴリズム開発と現在の融合フレームワークとのシームレスな統合を促進します。
業界の展望: 融合対応、コスト最適化、拡張性
4D mmWaveレーダーは、レーダーチップセットの進化とコスト構造の改善に伴い、量販車への採用が拡大しています。そのコスト効率、堅牢性、そして性能バランスの高さから、今後のL2++からL3アーキテクチャにとって重要なセンシング技術として位置付けられています。
安定性と構造化された深さの重要性が高まっているため、4D レーダーは次世代の自動運転システムの重要なコンポーネントであり続けると予想されます。
よくある質問
LiDAR は 4D mmWave レーダーに置き換えられますか?
LiDARと4Dレーダーは相性が良いです。LiDARの導入はシステム要件と予算に依存しますが、Vision + 4Dレーダーは、人気が高く経済的な主流のアーキテクチャとして台頭しています。
4Dレーダーは悪天候でもどのように機能しますか?
雨天、霧、または低照度環境下において、4Dレーダーは通常、視覚よりも安定した検知性能を維持します。ただし、状況や設定によって性能は異なります。
Linpowave は開発支援を提供していますか?
はい。Linpowaveは、融合モデルの開発を支援するために、包括的なポイントクラウドドキュメント、SDK、API、ツールチェーンを提供しています。
4D レーダーは市街地道路と高速道路の両方に適していますか?
はい。U300シリーズは近距離、市街地、低速の状況で優れた性能を発揮しますが、V300シリーズは長距離、高速での認識に最適です。