









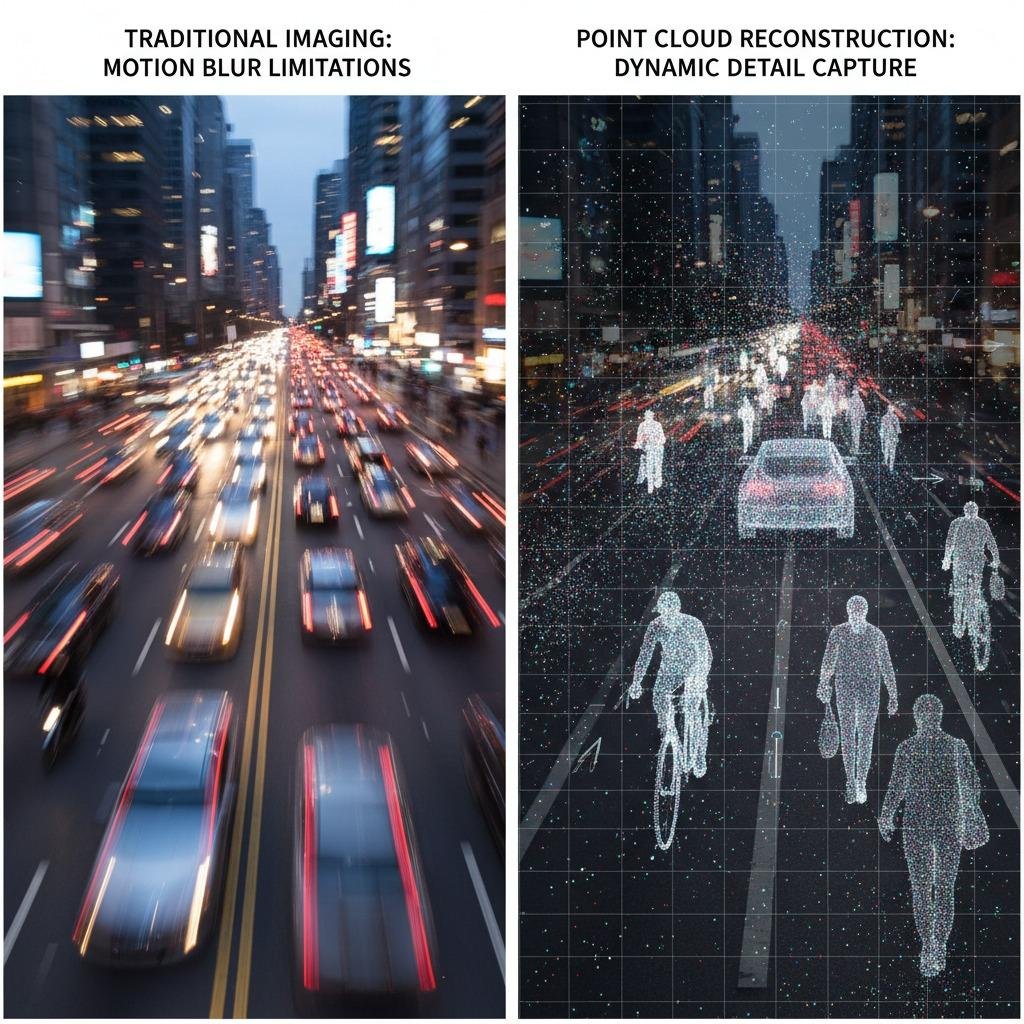
動的な環境を捉える際の課題
自律システムとロボット工学の急速な発展において、最大の課題の一つは、動的な環境を正確に捉え、解釈することです。従来の画像処理手法では、移動する物体を扱う際に不十分な場合が多く、データが不完全になったり、意思決定が不安定になったりします。そこで、点群再構成が重要な技術として浮上し、散在するデータポイントから詳細な3Dモデルを作成することが可能になります。しかし、高度な技術を適切に統合しなければ、モーションブラーやデータカバレッジの疎性といった問題が残り、自動運転車や監視ドローンなどのアプリケーションでリアルタイムの精度を実現することは困難です。
マイクロドップラー解析を統合した、動き検出の強化
動的なシーンキャプチャの限界に対処するため、点群再構成にマイクロドップラー解析を組み込むことは強力な解決策となります。マイクロドップラー解析は、ドローンの回転ブレードや歩行者の手足など、物体の可動部分によって生じる微妙な周波数シフトに焦点を当てます。このレーダーベースの知見を点群データと融合させることで、システムは静止要素と可動要素をより正確に区別し、再構成プロセスにおける誤検出を減らすことができます。例えば、都市部では、この統合により交通流のモデリング精度が向上します。従来の点群再構成だけでは、物体の軌跡の急激な変化を見落としてしまう可能性があるからです。このアプローチは、再構成された点群の密度と品質を向上させるだけでなく、環境ノイズに対するシステム全体の堅牢性も高めます。
動的物体追跡を活用したリアルタイム再構築
点群再構築におけるもう一つの重要な課題は、フレームをまたいで移動するオブジェクトを追跡する際に、連続性を維持することです。動的オブジェクト追跡は、速度と加速度データを使用してオブジェクトの位置を予測および更新するアルゴリズムを採用することで、この問題を解決します。点群再構築と組み合わせることで、オブジェクトが移動しても3Dマップがシームレスに進化し、データストリームの欠落を防ぐことができます。混雑した通路をナビゲートする倉庫ロボットを考えてみましょう。動的追跡がない場合、再構築された点群は移動する在庫を誤って表現し、衝突につながる可能性があります。3Dデータに最適化されたカルマンフィルタなどの予測追跡モデルを実装することで、再構築プロセスはより適応的になり、より安全で効率的な運用をサポートする高精度のモデルを提供できます。
探知・測距技術による障害物の克服
障害物検知と測距は、特に突然の障害物や野生動物などの予期せぬ事態によって作業が中断されるような非構造化環境では、新たな課題となります。LiDARやレーダー測距で強化された点群再構築は、これらの障害物を正確に識別しマッピングするために必要な深度認識を提供します。解決策はマルチセンサー融合にあり、測距データによって点群を精緻化し、潜在的な危険をリアルタイムで強調表示します。例えば、農業ロボットでは、この手法により移動する動物を検知しながら圃場レイアウトを再構築し、機械が経路を動的に調整できるようになります。再構築パイプライン内で障害物検知と測距を優先することで、システムの信頼性が向上し、ダウンタイムと運用リスクを最小限に抑えることができます。
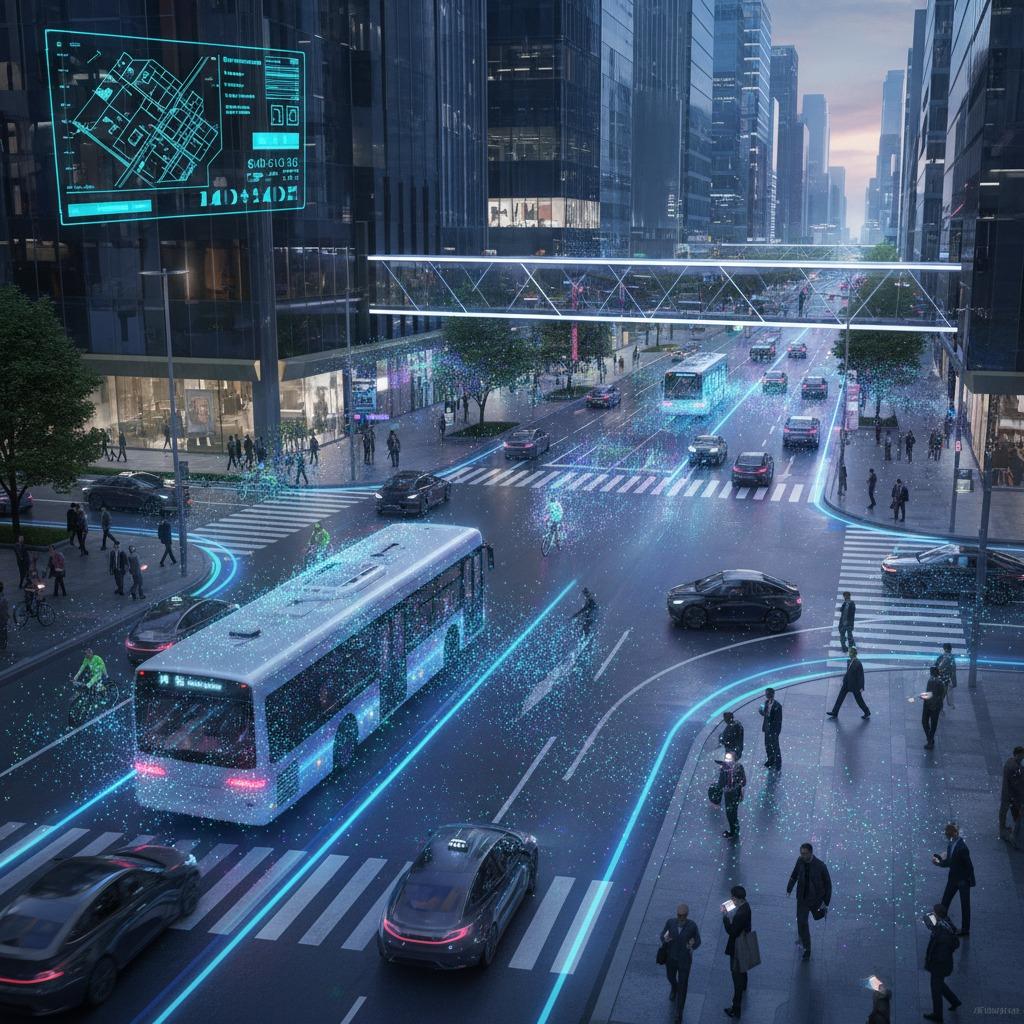
包括的な3D環境マッピングの実現
最後に、これらの課題に取り組む究極の目標は、すべての要素を統合して全体像を把握できる、堅牢な3D環境マッピングを実現することです。点群再構築が基盤となりますが、マイクロドップラー解析、動的物体追跡、障害物検出および測距を統合することで相乗効果が生まれます。この包括的なアプローチにより、生のセンサーデータが、変化に即座に対応できる実用的な3Dマップに変換されます。例えば、捜索救助活動において、これらの技術を搭載したドローンは、災害現場を再構築し、マイクロドップラー信号によって生存者の動きを追跡し、精密な測距によって障害物を回避できます。その結果、拡張性の高いソリューションが実現し、差し迫った再構築の問題を解決するだけでなく、高度なAI駆動型自律飛行への道を開き、複雑な現実世界環境において、より安全で効果的なナビゲーションを保証します。
これらの統合的な戦略を採用することで、産業界は不完全または古い環境データの落とし穴を克服し、革新的なアプリケーションのための点群再構築の可能性を最大限に引き出すことができる。