



レーダーのターゲット物質を理解する: 効果的な検出システムの鍵
高度なセンシング技術の領域では、レーダーのターゲット物質は、検出システムの有効性を決定する上で極めて重要な役割を果たします。自動車の安全、セキュリティ用途、医療モニタリングのいずれに使用される場合でも、材料の選択はレーダー波がターゲットとどのように相互作用するかに影響を与え、範囲や精度などの性能指標に直接影響します。この記事では、レーダー ターゲットの材質の基礎を探り、ミリ波レーダー検出やその先への影響を掘り下げ、材質がレーダーの精度と材質の相互作用をどのように形成し、落下検知レーダーの性能などのアプリケーションを強化するかについての洞察を提供します。
レーダーターゲット物質の背後にある科学
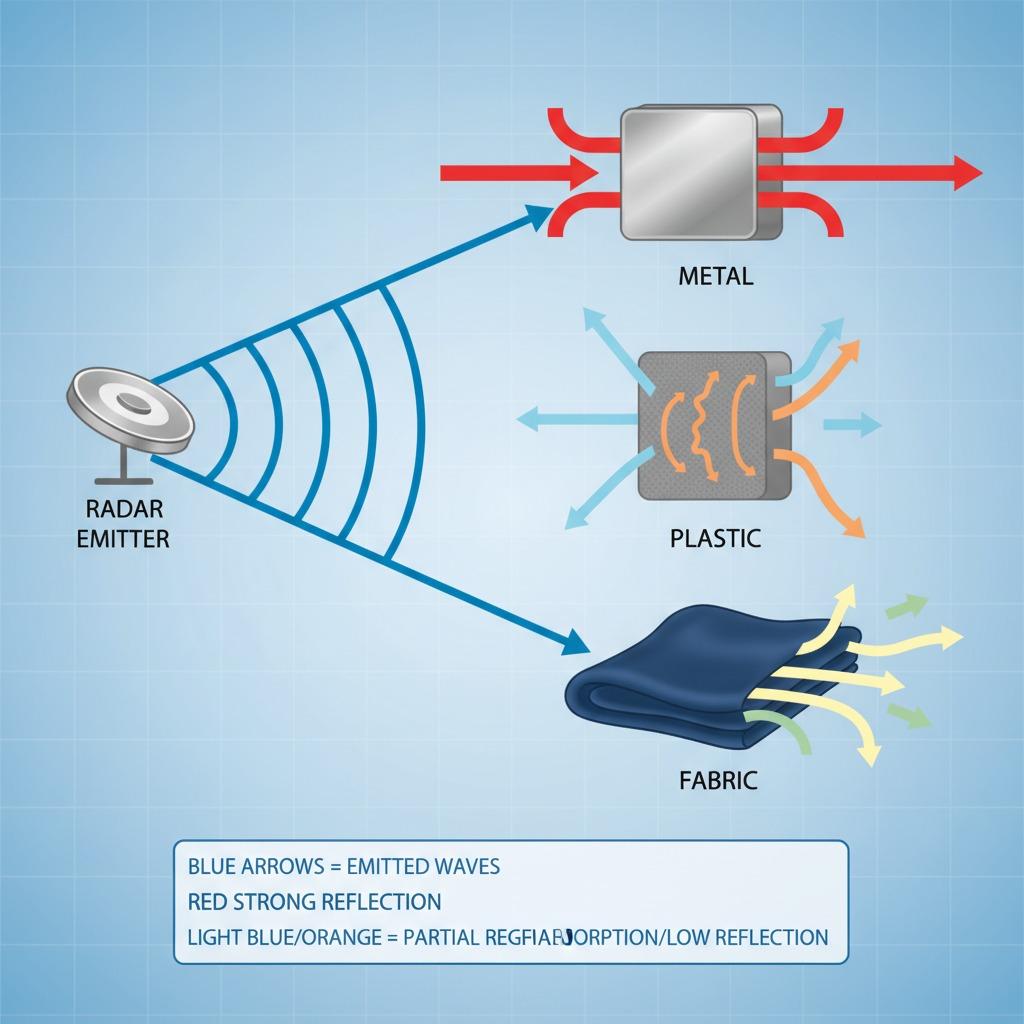
レーダー システム は、物体に反射する電磁波を放射することで動作し、戻ってくる信号を分析して存在、距離、速度を検出します。レーダーターゲットの材質は、その誘電特性、導電率、表面特性を通じてこの反射プロセスに基本的に影響を与えます。金属などの反射率の高い素材は強いエコーを生成するため、乱雑な環境での鮮明な検出に最適です。逆に、プラスチックや布地などの非金属材料は、電波の吸収または散乱の仕方が異なるため、信号強度が低下する可能性があります。 30 GHz を超える周波数を利用するミリ波レーダー検出では、波長が短くなり、表面の質感や組成とより敏感に相互作用するため、これらの材料の違いはさらに顕著になります。 IEEE の調査によると、ターゲットが誘電体で構成されているか導電性物質で構成されているかに応じて、レーダーの精度対材質が最大 40% 異なる可能性があることが示されており、センサー設計における材質固有のキャリブレーションの必要性が強調されています。
ミリ波レーダー検出に対する物質的影響
ミリ波レーダー検出は、高解像度のイメージングとモーションセンシングに優れていますが、その成功はレーダーのターゲット物質のダイナミクスを理解することにかかっています。たとえば、自動車用途では、レーダー センサーは金属製の車両部品と歩行者の柔らかい衣類を区別する必要があります。人間のターゲットによく見られる皮膚や布地などの素材は、ミリ波周波数でレーダー断面積 (RCS) が低くなり、検出の信頼性に課題が生じる可能性があります。エンジニアは、アンテナ設計を最適化するか、材料による減衰を考慮した信号処理アルゴリズムを使用することで、これを軽減することがよくあります。レーダー試験施設から得られた実際のデータは、開発中にレーダーターゲット物質分析を組み込むことで、多様な物体が関与するシナリオでの検出率を 25 ~ 30% 向上できることを示しています。これは、高度なミリ波機能を活用してさまざまな物質の相互作用を処理し、さまざまな環境で堅牢なパフォーマンスを保証する Linpowave レーダー センサーなどの新興テクノロジーに特に関係します。
最適化されたレーダーパフォーマンスによる落下検知の強化
転倒検知レーダーの性能は、特に高齢者介護システムにおいて、レーダーのターゲット材料の選択により命を救うことができる重要な用途を表しています。これらのレーダーは、人間の組織(主にミリ波帯域で比誘電率が 40 ~ 50 程度の比誘電率値を持つ水分が豊富な物質)の反射特性に依存して、微妙な動きを監視します。マテリアルのマッチングが不十分だと、誤検出が発生したり、背景が乱雑な中で落下が見落とされたりする可能性があります。 Journal of Biomedical Engineering に掲載された研究では、人間に似たレーダー ターゲット材料に合わせて落下検知レーダーの性能を調整すると、感度が 35% 向上し、スマート ホーム セットアップの応答時間が短縮されることが実証されています。 Linpowave レーダー センサーのようなデバイスは、AI 主導の処理を使用して材料の変動に適応し、これらの洞察を統合し、対照試験で 95% 以上の精度を達成します。このようなシステムは、設計においてレーダーの精度と素材を優先することにより、信頼性の高い非侵入型モニタリングを提供し、プライバシーを損なうことなくユーザーの安全性を強化します。
レーダー材料の革新における将来の傾向
レーダー技術が進化するにつれて、レーダーターゲット素材の革新が次世代の進歩を推進する準備が整っています。波の伝播を操作するように設計された新たなメタマテリアルは、壁や霧の中などの困難な状況でもミリ波レーダーの検出を向上させることが期待されています。落下検知レーダーの性能に関しては、生体適合性材料により人間とターゲットの相互作用がさらに改善され、医療展開におけるエラーが最小限に抑えられる可能性があります。 Linpowave レーダー センサーは、動的設定における素材に対するレーダー精度の向上を示す最近のプロトタイプによって証明されているように、リアルタイムで適応する素材認識アルゴリズムを組み込んで、この傾向を例示しています。 MarketsandMarkets の業界予測では、これらの材料中心の開発によってミリ波レーダー市場が 2028 年まで年間 15% 成長すると予測されています。最終的に、レーダーのターゲット物質を深く理解することは、現在のシステムを最適化するだけでなく、精密センシングの新たな可能性を解き放ち、現代の技術情勢においてその不可欠な役割を強調します。