










レーダーおよびセンシングワークフローにおいてシーン分割が重要な理由
シーンセグメンテーションは、センシングプログラムがラボでのデモンストレーションを終え、実際の環境に移行すると、至るところで目にする用語の一つになりつつあります。簡単に言えば、センサーシーンを意味のある領域に分割し、システムがそれぞれの領域で何が起こっているかを解釈できるようにするプロセスです。交通量の多い場所、木々の間、機械の近く、あるいは混雑した工業地帯でレーダーを安定させようとするエンジニアにとっては、これは学術的な話に聞こえるかもしれません。しかし、実際にレーダーを安定させようとすると、それは現実的な問題になります。つまり、詳細をあまり失うことなく、使用可能なターゲットを背景の活動からどのように分離するか、ということです。
製品開発チームにとって、この答えはシステムのパフォーマンス、計算負荷、そして分類や追跡に必要な下流ロジックの量に影響します。調達担当者にとっては、多くの場合、部品構成やコストと性能の許容範囲が変わります。「何か」を捉えるセンサーだけでは不十分です。後続のアプリケーションにとってシーンを十分に分離できなければ意味がありません。
根本的な課題:詳細度が高くなると、通常はノイズも増える。
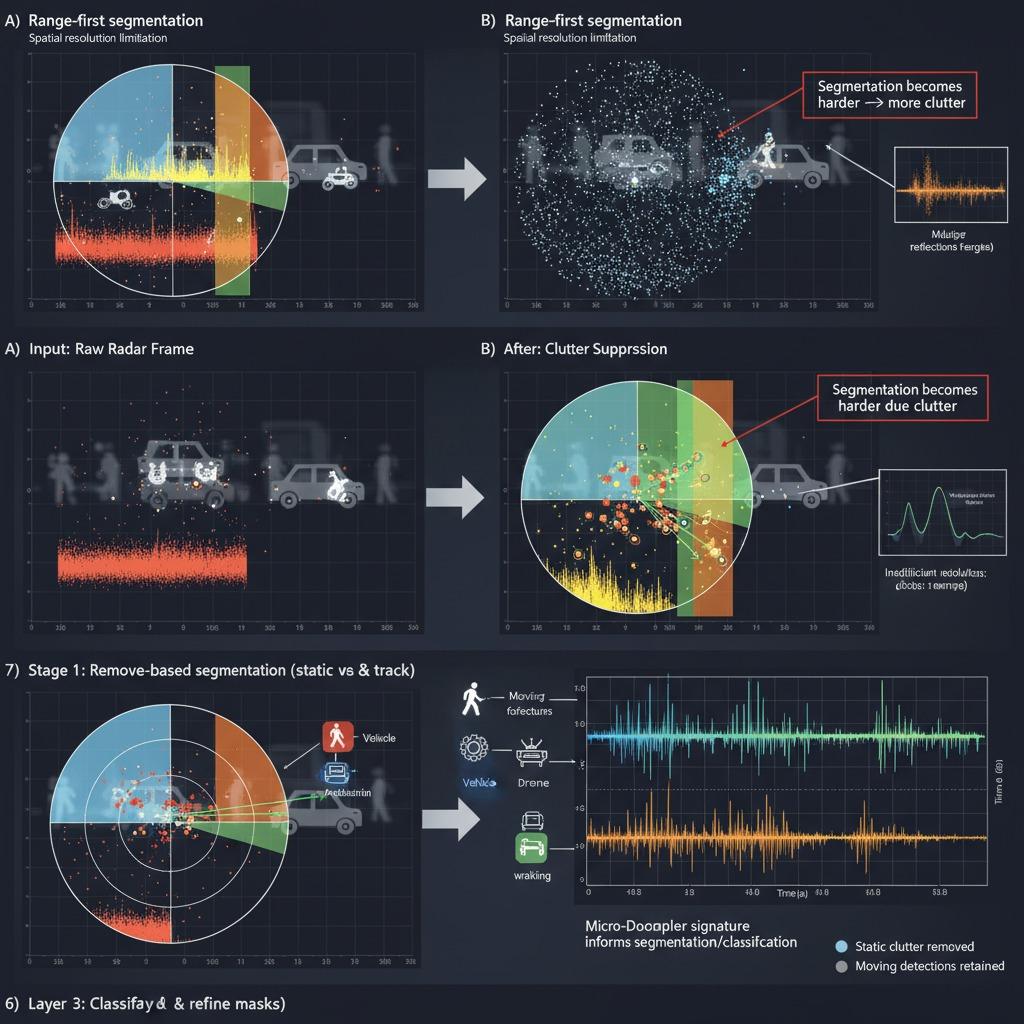
多くのセンシングシステムにおける課題は同じです。近接する物体がぼやけて見えないように空間分解能を高めたいのですが、分解能が高くなると、システムはより多くのノイズ、偽の構造、そして見かけ上の動きを捉えてしまいます。そのため、セグメンテーションが容易になるどころか、むしろ難しくなってしまうのです。
これは特にレーダーベースのアプリケーションにおいて顕著であり、クラッター抑制によって出力が有用か、単にノイズが多いだけかを判断できます。壁、床、濡れた表面、コンベア、車両などからの背景反射が、受信信号の大部分を占めることがあります。適切なセグメンテーション手法を用いることで、システムはシーンの中で重要な部分を分離することができ、下流のすべてのアルゴリズムが同じ混沌とした点群やレンジドップラーマップを処理する必要がなくなります。
実務上の注意点:多くのプロジェクトは、導入後の環境変化を過小評価しがちです。たとえハードウェアが同一であっても、管理されたテスト環境と実際の生産ラインは全く異なる状況です。
シーン分割はシステムが判断するのに役立つ
大まかに言うと、シーンセグメンテーションは、エンジニアと購入者の双方にとって重要な3つの意思決定をサポートします。
それは物体の位置を特定するのに役立ちます。それが最も明白な機能ですが、それはほんの始まりに過ぎません。
これは、物体の種類や動きのパターンを区別するのに役立ちます。用途によっては、マイクロドップラー信号によって、物体が回転しているのか、歩いているのか、振動しているのか、あるいは単に視野を通過しているだけなのかなど、物体の動きに関する有用な手がかりを得ることができます。
複数の物体が同時に出現した場合でも、追跡の連続性を維持するのに役立ちます。このように、マルチターゲット追跡は、検出結果の統合や重複した反射信号によってトラッカーが常に混乱することがなくなるため、はるかに信頼性の高いものとなります。
一般的なアプローチとその適用箇所
範囲優先のセグメンテーション
対象物と背景の間に十分な分離がある場合、距離ベースのセグメンテーションは多くの場合最もシンプルな方法です。対象物が異なる距離に分布しており、システムの空間解像度が十分な場合に最も効果を発揮します。欠点は明らかで、対象物が密集している場合は、距離だけでは不十分な場合があります。
動きと特徴に基づくセグメンテーション
静止したノイズが大きな問題となる場合、動きの手がかりが役立ちます。レーダーシステムでは、静止構造物と移動物体を分離し、特徴分析によって結果を精緻化することが考えられます。これによりノイズ抑制効果は向上しますが、ソフトウェアスタックの負荷も高くなる可能性があります。
ハイブリッドアプローチ
実際の多くの導入環境では、単一の手法ではなく、複数の手法を組み合わせたアプローチが最善策となります。まず、最初の処理で背景の目立つ要素を除去し、次に2回目の処理で動き、形状、または特徴のシグネチャを利用してシーンを洗練させます。シーンが複雑な場合や、システムが変化する状況下でも安定した出力を必要とする場合、この追加の手順はしばしば効果を発揮します。
エンジニアおよび調達チームの選考基準
センシングプラットフォームやセグメンテーションパイプラインを評価する場合は、いくつか直接的な質問をしてみましょう。
背景が変わった場合、どの程度鮮明に表示され続けるか?
あなたが関心を持つ対象物にとって、実際にどの程度の空間分解能が必要ですか?
近接する物体を、過剰な誤分離を起こすことなく分離できますか?
下流の複数ターゲット追跡に必要な情報を十分に保持しているか?
必要な計算能力はどれくらいか、また、エッジ環境においてそれは許容範囲内か?
これらの疑問が重要なのは、セグメンテーションが単なるソフトウェア機能ではなく、システム全体のアーキテクチャを形作るからです。より高性能なアルゴリズムには、当初想定されていた部品表よりも、より優れたフロントエンドデータ品質、より厳密なタイミング、あるいはより多くのメモリが必要になる可能性があります。
プロジェクトの進行を遅らせるよくある間違い
よくある間違いの一つは、強力な分類器を使えばセグメンテーションの不備が解消されると考えることです。実際には、そうはなりません。シーンが最初にきちんと分離されていなければ、分類器はその混乱を引き継いでしまうのです。
もう一つの間違いは、システムをたった一つのテストシナリオに合わせて調整してしまうことです。デモではうまく見えても、本番環境では静かに不具合が発生する可能性があります。エンジニアはたいていこのことを本能的に理解していますが、問題はスケジュールのプレッシャーによってこの問題が後回しにされてしまうことです。
3つ目の問題は、プログラムの終盤までノイズ抑制を無視してしまうことです。その頃には、チームは既にセンサーの配置、筐体の設計、あるいは処理ハードウェアの選定を決定しており、ノイズ除去が困難になっている可能性があります。
購入者へのアドバイス:契約前に確認すべき事項
洗練された実験室映像だけでなく、実際の使用状況に近い場面でシステムがどのように動作するかを示す証拠を求めてください。アプリケーションが密集した環境を扱う場合は、重なり合う物体や背景の反射をどのように処理するかを確認してください。使用状況が動きの分析に依存する場合は、マイクロドップラー信号が、あなたが重視する条件下で使用可能かどうかを確認してください。
また、セグメンテーションパイプラインの各段階で何が行われているかを明確に説明してもらうことも有効です。ベンダーがシーンの分割方法を説明できない場合、システムは見た目以上に脆弱である可能性があります。
よくある質問
シーン分割はレーダーでのみ使用されるのですか?
いいえ。これは、センシングシステムとビジョンシステムの両方で使用されています。レーダーは、ノイズや動きを分離するのが難しいため、特別な課題を抱えていますが、基本的な考え方はより広範です。
空間解像度の向上は、必ずしもセグメンテーション精度の向上につながるのでしょうか?
必ずしもそうとは限りません。空間解像度を高くすると、より詳細な情報が得られますが、同時に複雑さや煩雑さも増す可能性があります。適切なレベルは用途によって異なります。
セグメンテーションの最も重要な成果は何ですか?
信頼性の高い下流の意思決定。セグメンテーションによってシステムが物体をより一貫して検出、分類、または追跡できるのであれば、それはその役割を果たしていると言える。
実践的な次のステップ
センシングオプションを比較検討する場合や既存の設計を見直す場合は、まずシーンそのものから始めましょう。背景、ターゲット密度、動きのパターン、そして実際に想定されるノイズレベルをマッピングします。次に、デモ環境よりもノイズが多い状況でもセグメンテーション手法が機能するかどうかをテストします。この1つのステップを踏むだけで、後々のエンジニアリング時間を大幅に節約できることがよくあります。