









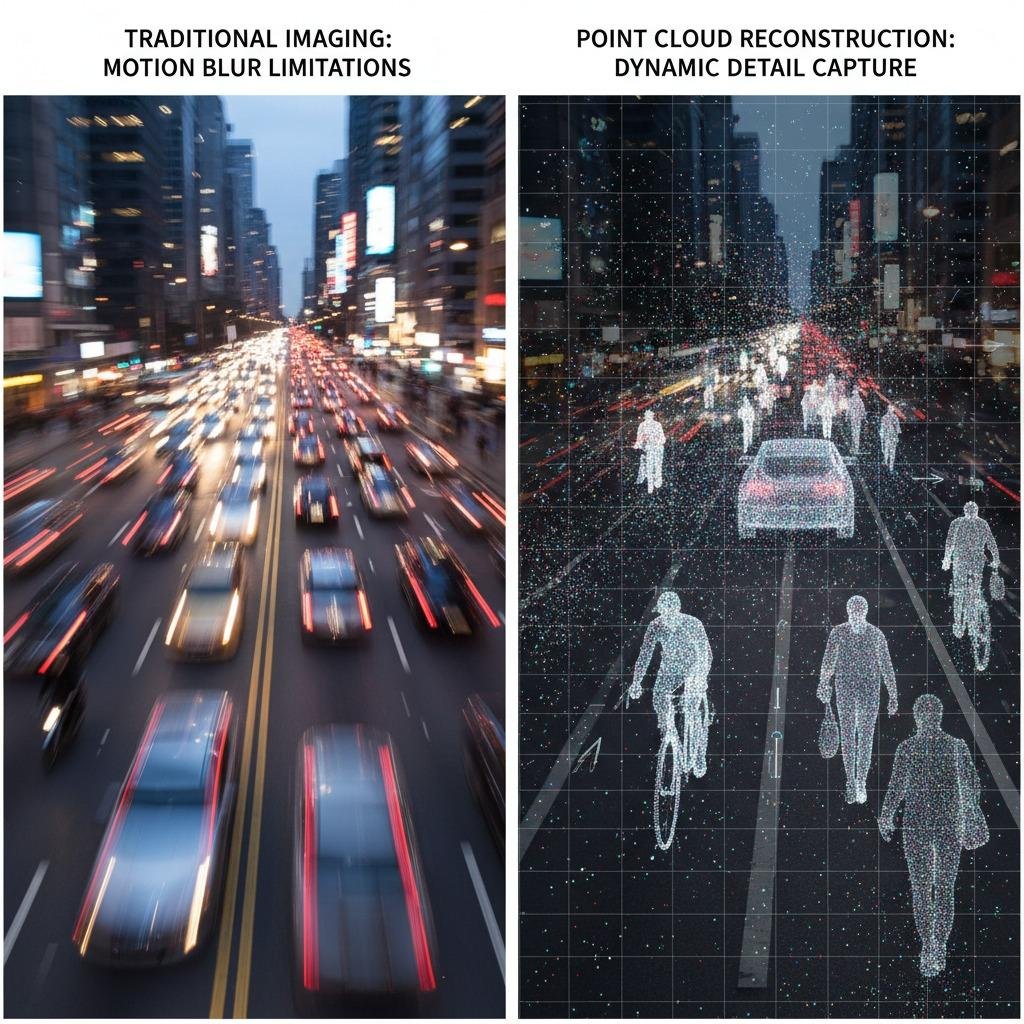
Трудности при съемке динамических сред
В стремительно развивающемся мире автономных систем и робототехники одной из самых больших проблем является точное получение и интерпретация динамических данных об окружающей среде. Традиционные методы визуализации часто оказываются неэффективными при работе с движущимися объектами, что приводит к неполным данным и ненадежному принятию решений. Реконструкция облака точек становится здесь критически важной технологией, позволяющей создавать детализированные 3D-модели из разрозненных точек данных. Однако без надлежащей интеграции передовых методов сохраняются такие проблемы, как размытие изображения из-за движения и недостаточная плотность покрытия, что затрудняет достижение точности в реальном времени в таких приложениях, как беспилотные автомобили или дроны наблюдения.
Интеграция микродоплеровского анализа для повышения эффективности обнаружения движения.
Для преодоления ограничений динамической съемки сцен, включение микродоплеровского анализа в реконструкцию облака точек предлагает мощное решение. Микродоплеровский анализ фокусируется на тонких сдвигах частоты, вызванных движущимися частями объектов, такими как вращающиеся лопасти дрона или конечности пешехода. Объединяя эти данные, полученные с помощью радара, с данными облака точек, системы могут лучше различать статические и движущиеся элементы, уменьшая количество ложных срабатываний в процессе реконструкции. Например, в городских условиях такая интеграция позволяет более точно моделировать транспортные потоки, где традиционная реконструкция облака точек может не учитывать быстрые изменения траекторий объектов. Такой подход не только улучшает плотность и качество реконструированных облаков точек, но и повышает общую устойчивость системы к воздействию шума окружающей среды.
Использование динамического отслеживания объектов для реконструкции в реальном времени.
Еще одна ключевая проблема при реконструкции облака точек — поддержание непрерывности при отслеживании движущихся объектов в разных кадрах. Динамическое отслеживание объектов решает эту проблему, используя алгоритмы, которые прогнозируют и обновляют положения объектов на основе данных о скорости и ускорении. В сочетании с реконструкцией облака точек это обеспечивает плавное изменение 3D-карт по мере движения объектов, предотвращая разрывы в потоке данных. Рассмотрим складского робота, перемещающегося по загроможденным проходам: без динамического отслеживания реконструированные облака точек могут неточно отображать смещающийся товар, что приведет к столкновениям. Внедрение моделей прогнозирующего отслеживания, таких как фильтры Калмана, оптимизированные для 3D-данных, делает процесс реконструкции более адаптивным, обеспечивая высокоточные модели, которые поддерживают более безопасную и эффективную работу.
Преодоление препятствий с помощью методов обнаружения и определения расстояния.
Обнаружение и определение расстояния до препятствий представляют собой еще одну проблему, особенно в неструктурированных средах, где неожиданные препятствия, такие как внезапно появившиеся обломки или дикие животные, могут нарушить работу. Реконструкция облака точек, дополненная данными LiDAR или радиолокационного определения расстояния, обеспечивает необходимое восприятие глубины для точной идентификации и картирования этих препятствий. Решение заключается в объединении данных от нескольких датчиков, где данные определения расстояния уточняют облака точек, чтобы в режиме реального времени выделять потенциальные опасности. Например, в сельскохозяйственной робототехнике этот метод может восстанавливать планировку полей, одновременно обнаруживая движущихся животных, что позволяет машинам динамически корректировать траектории движения. Приоритизация обнаружения и определения расстояния до препятствий в процессе реконструкции повышает надежность систем, минимизируя время простоя и операционные риски.
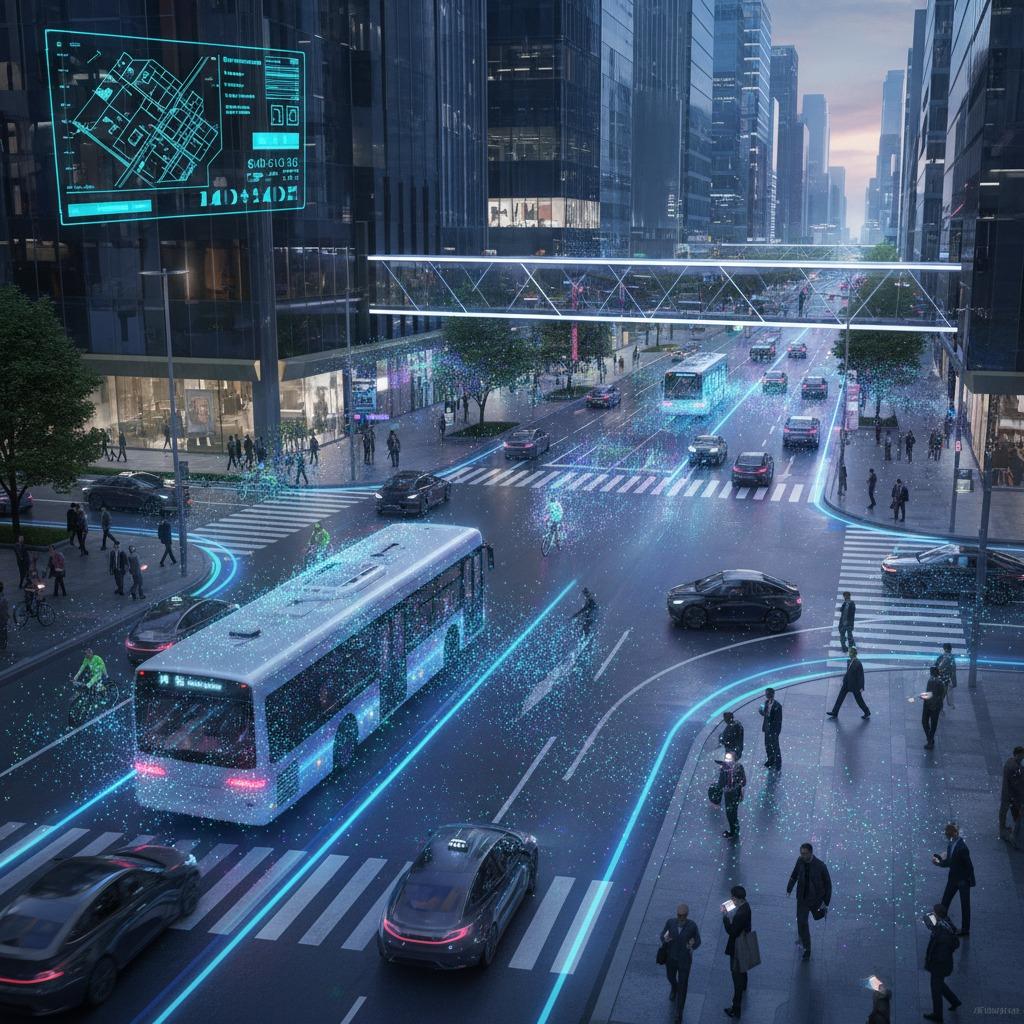
Создание комплексного трехмерного экологического картографирования
В конечном итоге, главная цель решения этих задач — создание надежного трехмерного картографирования окружающей среды , которое объединяет все элементы для получения целостного представления. Реконструкция облака точек служит основой, но интеграция микродоплеровского анализа, динамического отслеживания объектов, обнаружения препятствий и определения их расстояния создает синергетический эффект. Этот комплексный подход преобразует необработанные данные датчиков в действенные трехмерные карты, которые адаптируются к изменениям в режиме реального времени. Например, в сценариях поисково-спасательных работ дроны, оснащенные этими технологиями, могут восстанавливать зоны бедствия, отслеживать перемещения выживших с помощью микродоплеровских сигнатур и избегать препятствий благодаря точному определению расстояния. В результате получается масштабируемое решение, которое не только решает непосредственные проблемы реконструкции, но и открывает путь для передовой автономности на основе искусственного интеллекта, обеспечивая более безопасную и эффективную навигацию в сложных условиях реального мира.
Внедрение этих комплексных стратегий позволит отраслям промышленности преодолеть недостатки неполных или устаревших экологических данных, раскрыв весь потенциал реконструкции облаков точек для инновационных приложений.