










Что такое радар навигации робота?
Радар навигации роботов — это передовая технология, позволяющая роботам точно и надежно перемещаться в сложных условиях. Эта радиолокационная система использует радиоволны для обнаружения препятствий, составления карты окружающей среды и определения положения робота в режиме реального времени. Часто интегрируемая в автономные системы, она играет решающую роль в таких приложениях, как автоматизация складов, дроны-доставщики и исследовательские вездеходы. Излучая и принимая электромагнитные сигналы, радар навигации роботов помогает роботам избегать столкновений и планировать эффективные траектории, что делает его незаменимым в динамичных условиях с ограниченной видимостью. 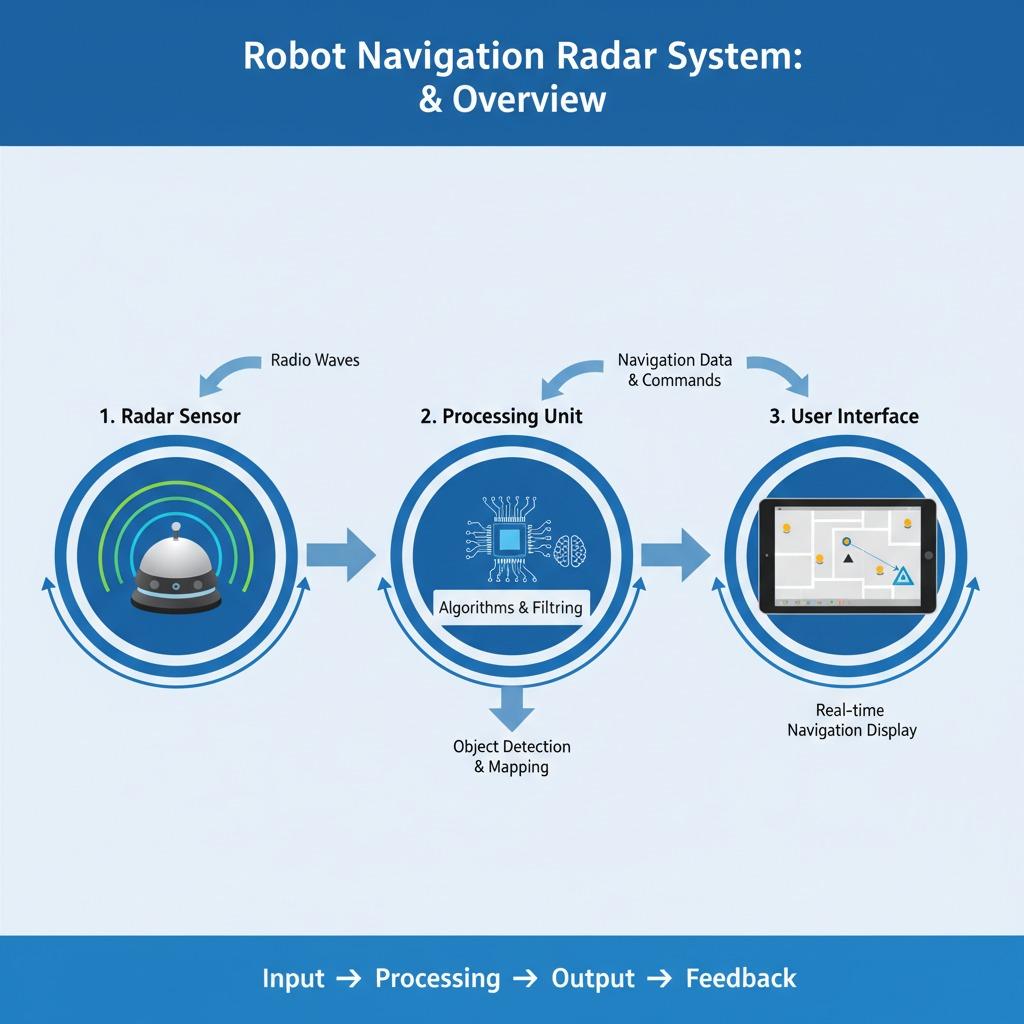
Как работает миллиметровый радар для навигации роботов?
Радар миллиметрового диапазона для навигации роботов работает в частотном диапазоне миллиметровых волн, обычно от 30 ГГц до 300 ГГц, что позволяет осуществлять высокоточное обнаружение на коротких и средних дистанциях. Эта технология посылает короткие импульсы радиоволн, которые отражаются от объектов и возвращаются к датчику, предоставляя подробную информацию о расстоянии, скорости и форме. В отличие от камер или лидаров, радар миллиметрового диапазона для навигации роботов демонстрирует исключительно высокую эффективность в неблагоприятных условиях, таких как туман, пыль или темнота, обеспечивая бесперебойную работу. Он особенно ценится в робототехнике за низкое энергопотребление и компактные размеры, что позволяет легко интегрировать его в мобильные платформы без ущерба для производительности.
Каковы преимущества использования радара для восприятия окружающей среды роботами?
Радар восприятия окружающей среды для роботов повышает способность робота понимать окружающую среду и взаимодействовать с ней, обеспечивая круговой обзор на 360 градусов. Этот тип радара обнаруживает не только статические препятствия, но и движущиеся объекты, такие как люди или другие роботы, что позволяет заблаговременно корректировать стратегии навигации. Ключевые преимущества включают повышение безопасности, поскольку снижает риск несчастных случаев в переполненных или непредсказуемых условиях, и повышение эффективности за счет точного картографирования пространства. Радар восприятия окружающей среды для роботов также устойчив к внешним помехам, что делает его идеальным для использования на открытом воздухе или в промышленных условиях, где традиционные датчики могут выйти из строя.
Как радарный датчик мобильного робота повышает автономность?
Мобильный радарный датчик для роботов разработан для портативности и быстрого развертывания в различных роботизированных системах, от сервисных роботов до автономных транспортных средств. Он обрабатывает радарные данные для создания моделей окружающей среды в реальном времени, позволяя роботу самостоятельно принимать обоснованные решения. Этот датчик превосходно справляется с обеспечением непрерывного обновления информации об ориентации робота и его близости к опасностям, что крайне важно для беспрепятственного передвижения. Пользователи часто отмечают его долговечность и минимальные требования к техническому обслуживанию, что обеспечивает долгосрочную надежность в сложных условиях, таких как поисково-спасательные операции или мониторинг сельского хозяйства.
Какова роль радиолокационной локализации роботов в современной робототехнике?
Система локализации роботов на основе радара использует радиолокационные сигналы для точного определения положения робота относительно известных ориентиров или с помощью методов одновременной локализации и картографирования (SLAM). Этот метод сочетает радиолокационные данные с алгоритмами для коррекции дрейфа позиционирования, достигая точности на уровне сантиметров даже в зонах, где отсутствует GPS-сигнал. Он особенно полезен в помещениях или подземных условиях, где другие инструменты локализации испытывают трудности. Объединяя радиолокационные данные с данными других датчиков, система локализации роботов на основе радара повышает общий интеллект системы, позволяя роботам динамически адаптироваться к изменениям и выполнять задачи с большей точностью.
Типичные проблемы и решения при внедрении радара для навигации роботов
Внедрение радиолокационных систем навигации роботов может столкнуться с такими проблемами, как помехи сигнала в загроможденных пространствах или необходимость в вычислительной мощности для быстрой обработки данных. Решения включают в себя передовые алгоритмы обработки сигналов, которые фильтруют шум, и многорадарные антенные решетки для всестороннего охвата. Для миллиметровых радаров, используемых для навигации роботов, методы калибровки обеспечивают оптимальную чувствительность, а обновления программного обеспечения учитывают меняющиеся требования окружающей среды. Интеграция радарных датчиков в мобильных роботах часто требует проверки совместимости с существующими архитектурами роботов, но модульные конструкции упрощают этот процесс. В целом, эти технологии продолжают развиваться, предлагая масштабируемые решения для разнообразных задач робототехники.
Перспективные тенденции в радиолокационных технологиях для робототехники.
В перспективе достижения в области радаров для распознавания окружающей среды роботами и локализации роботов на основе радаров обещают еще более компактные и эффективные датчики с усовершенствованиями на основе искусственного интеллекта. Интеграция с сетями 5G может позволить создать роевую робототехнику, где несколько устройств совместно используют данные радара для коллективной навигации. По мере снижения стоимости такие роботы станут стандартом в потребительских роботах, совершив революцию в домашней автоматизации и персональных помощниках. Осведомленность об этих тенденциях помогает разработчикам и пользователям в полной мере использовать потенциал радаров для создания более интеллектуальных и безопасных роботизированных экосистем.