










Почему сегментация сцены важна в радиолокационных и сенсорных рабочих процессах.
Сегментация сцены становится одним из тех терминов, которые встречаются повсюду, как только программа мониторинга выходит за рамки лабораторных демонстраций и переходит в реальную среду. Проще говоря, это процесс разделения сцены, отображаемой датчиком, на значимые области, чтобы система могла интерпретировать происходящее в каждой из них. Это звучит академично, пока вы не окажетесь инженером, пытающимся обеспечить стабильность радара в транспортном потоке, сквозь листву, рядом с оборудованием или в переполненном промышленном цехе. Тогда это становится практическим вопросом: как отделить полезные цели от фоновой активности, не теряя при этом слишком много деталей?
Для продуктовых команд ответ влияет на производительность системы, вычислительную нагрузку и объем необходимой логики для классификации или отслеживания. Для менеджеров по закупкам это часто меняет состав компонентов и приемлемый компромисс между стоимостью и возможностями. Датчика, который «что-то видит», недостаточно, если он не может достаточно хорошо отделить сцену для последующего применения.
Главная проблема: чем больше деталей, тем обычно больше шума.
В большинстве сенсорных систем точка давления одинакова. Необходимо более высокое пространственное разрешение, чтобы близлежащие объекты не сливались воедино, но более высокое разрешение также означает, что система видит больше помех, больше ложных структур и больше кажущегося движения. Это усложняет, а не упрощает сегментацию.
Это особенно актуально в приложениях, основанных на радарах, где подавление помех может определять, является ли выходной сигнал полезным или просто перегруженным. Фоновые отражения от стен, полов, влажных поверхностей, конвейеров или транспортных средств могут доминировать в возвращаемом сигнале. Хороший подход к сегментации помогает системе изолировать важные части сцены, вместо того чтобы заставлять каждый последующий алгоритм обрабатывать одно и то же запутанное облако точек или карту дальности-доплера.
Практическое предостережение: во многих проектах недооценивается, насколько сильно меняется окружающая среда после развертывания. Контролируемая тестовая зона и работающая производственная линия — это не одно и то же, даже если оборудование идентично.
Какая сегментация сцены помогает системе принять решение?
В общих чертах, сегментация сцены помогает принять три важных решения как для инженеров, так и для покупателей.
Это помогает определить местоположение объектов. Это самая очевидная функция, но это только начало.
Это помогает различать классы объектов или модели движения. В некоторых приложениях микродоплеровский эффект может дать полезные подсказки о том, как движется объект: вращается ли он, движется ли, вибрирует или просто проходит через поле зрения.
Это помогает сохранить непрерывность отслеживания, когда несколько объектов появляются одновременно. Именно здесь отслеживание нескольких целей становится гораздо более надежным, поскольку трекер не постоянно сбивается с толку из-за слияния обнаружений или перекрывающихся сигналов.
Распространенные подходы и их применение.
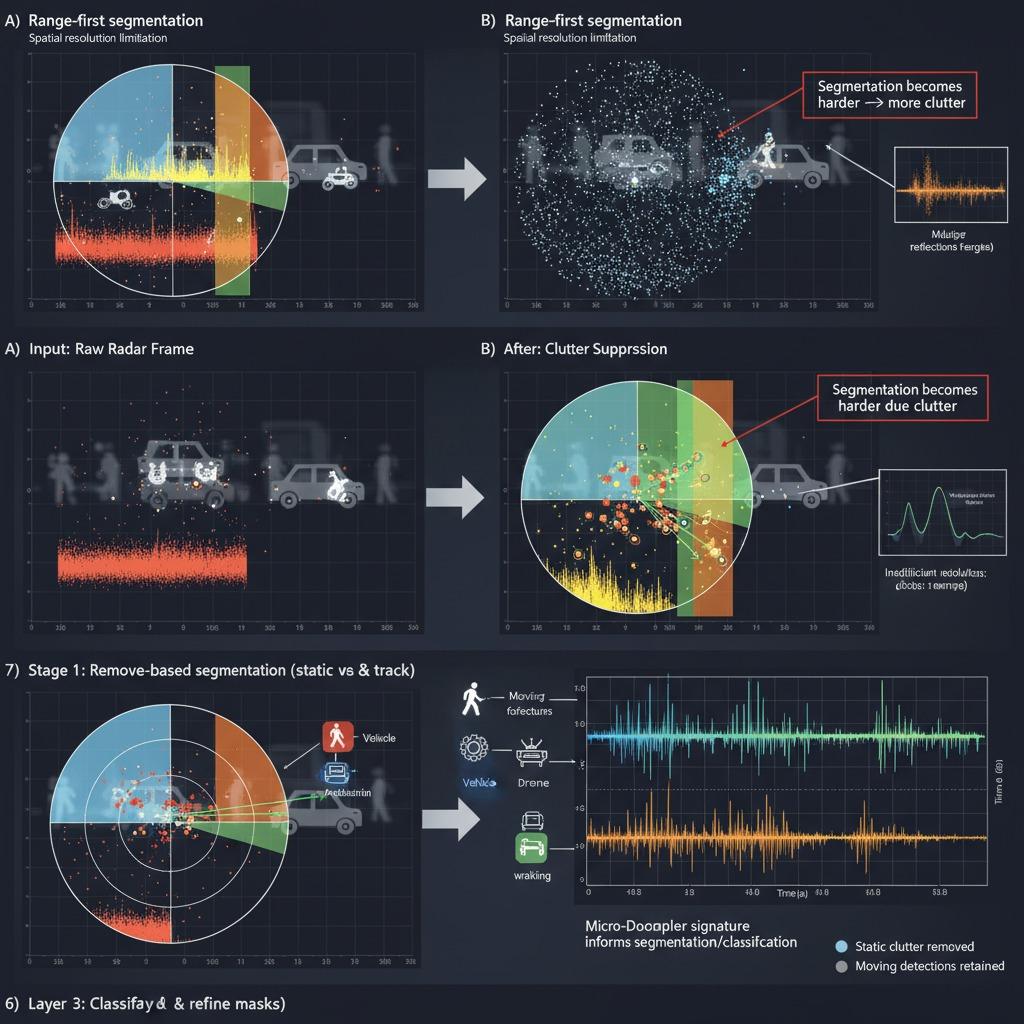
Сегментация с использованием диапазона в первую очередь
Сегментация на основе расстояния часто является самым простым способом, когда сцена достаточно разделена между целями и фоном. Она лучше всего работает, когда объекты распределены на разных расстояниях, а пространственное разрешение системы достаточно для этой задачи. Недостаток очевиден: если сцена плотная, одного расстояния может быть недостаточно.
Сегментация на основе движения и признаков
Когда стационарные помехи представляют собой серьезную проблему, могут помочь признаки движения. В радиолокационных системах это может включать в себя отделение статических структур от движущихся объектов и последующее уточнение результата с помощью анализа признаков. Это может улучшить подавление помех, хотя и может увеличить нагрузку на программное обеспечение.
Гибридные подходы
Во многих реальных сценариях наилучшее решение — это не один метод, а многоуровневая обработка. На первом этапе удаляются очевидные элементы фона, затем на втором этапе используются сигнатуры движения, формы или характеристик для уточнения сцены. Этот дополнительный шаг часто окупается, когда сцена насыщена деталями или когда системе требуется стабильный результат в изменяющихся условиях.
Критерии отбора инженеров и специалистов по закупкам.
Если вы оцениваете сенсорную платформу или конвейер сегментации, задайте несколько прямых вопросов.
Насколько хорошо оно сохраняет свои качества при изменении фона?
Насколько высокое пространственное разрешение действительно необходимо для объектов, которые вас интересуют?
Может ли оно разделять близко расположенные объекты без внесения чрезмерного количества ложных срабатываний?
Сохраняет ли система достаточно информации для отслеживания нескольких целей в дальнейшем?
Какой объем вычислительных ресурсов это требует, и приемлемо ли это на периферии сети?
Эти вопросы важны, потому что сегментация — это не просто функция программного обеспечения. Она формирует всю архитектуру системы. Более совершенному алгоритму может потребоваться лучшее качество данных на входе, более жесткая временная задержка или больший объем памяти, чем предполагалось изначально.
Распространенные ошибки, замедляющие выполнение проектов.
Одна из распространенных ошибок — предположение, что сильный классификатор исправит плохую сегментацию. Обычно это не так. Если сцена не разделена четко, классификатор наследует эту путаницу.
Ещё одна ошибка — настройка системы только для одного тестового сценария. Это может хорошо выглядеть в демонстрации, но незаметно провалиться при развертывании. Инженеры, как правило, интуитивно это понимают; проблема в том, что из-за сжатых сроков этот вопрос может быть отложен в сторону.
Третья проблема заключается в игнорировании подавления помех до поздней стадии программы. К тому времени команда, возможно, уже определилась с размещением датчиков, конструкцией корпуса или оборудованием обработки, что затрудняет очистку данных.
Советы покупателям: что следует запросить перед принятием решения.
Попросите предоставить доказательства того, как система ведет себя в сценах, максимально приближенных к вашему реальному сценарию использования, а не просто отредактированные лабораторные видеозаписи. Если приложение работает в условиях высокой плотности объектов, попросите показать, как система обрабатывает перекрывающиеся объекты и отражения на заднем плане. Если сценарий использования зависит от анализа движения, проверьте, применима ли микродоплеровская сигнатура в условиях, которые для вас важны.
Также полезно запросить четкое объяснение того, что делает конвейер сегментации на каждом этапе. Если поставщик не может объяснить, как разделяется сцена, система может оказаться более уязвимой, чем кажется.
Часто задаваемые вопросы
Используется ли сегментация сцены только в радарах?
Нет. Он используется в системах сенсорики и машинного зрения. Радар представляет собой особые сложности, поскольку помехи и движение трудно разделить, но основная идея более широка.
Всегда ли более высокое пространственное разрешение улучшает сегментацию?
Не автоматически. Более высокое пространственное разрешение может выявить больше деталей, но также может увеличить сложность и загромождение. Полезный уровень зависит от области применения.
Какой самый важный результат сегментации?
Надежные решения на последующих этапах. Если сегментация помогает системе более точно обнаруживать, классифицировать или отслеживать объекты, значит, она выполняет свою работу.
Практический следующий шаг
Если вы сравниваете варианты датчиков или анализируете существующую конструкцию, начните с самой сцены. Составьте карту фона, плотности целей, характера движения и уровня беспорядка, который вы ожидаете. Затем проверьте, работает ли подход к сегментации в условиях, менее упорядоченных, чем в демонстрационной среде. Этот шаг часто значительно экономит время инженеров в дальнейшем.