


克服高级雷达应用中场景分割的挑战
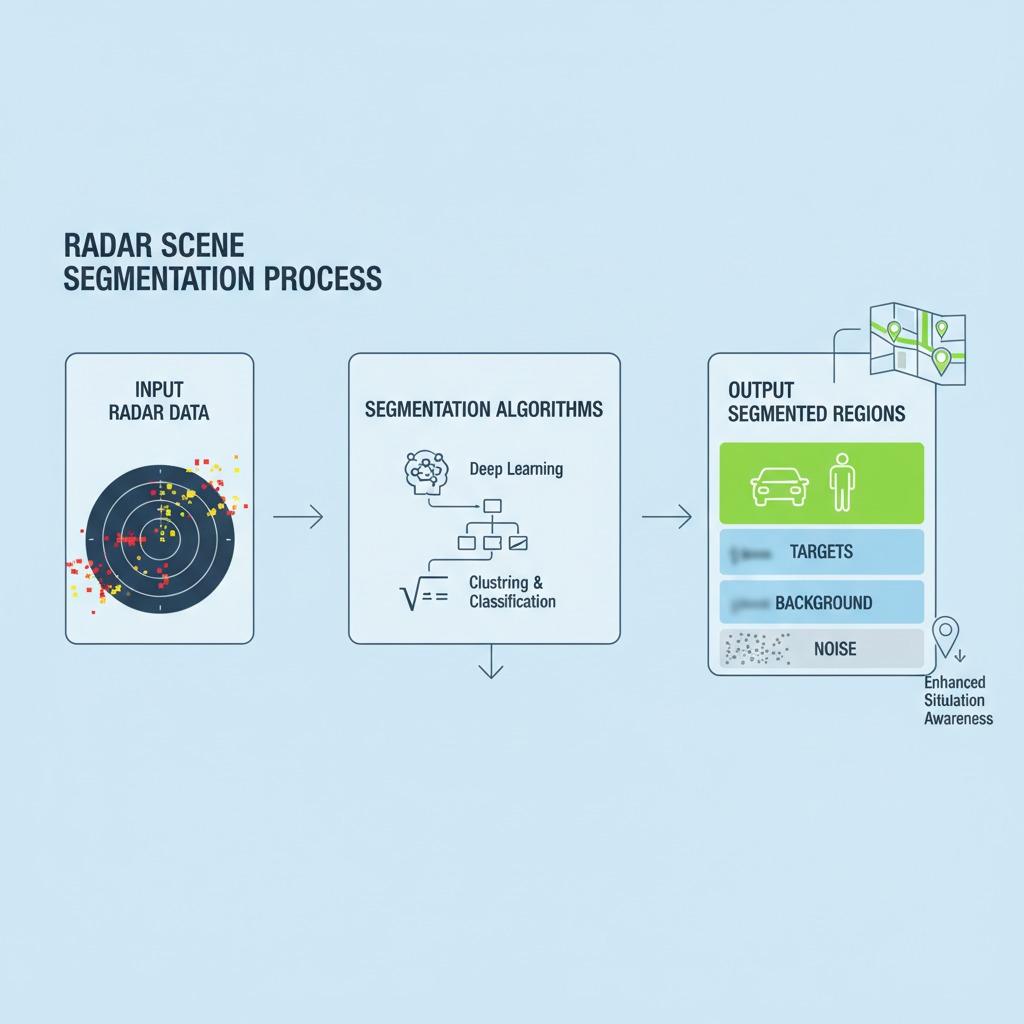
在雷达信号处理领域,场景分割是一项关键技术,它能够将雷达场景精确划分为有意义的区域,例如区分目标、背景和噪声。然而,专业人员常常面临诸多挑战,包括空间分辨率低导致目标边界模糊、微多普勒信号干扰使运动分析复杂化、持续存在的杂波掩盖微弱信号,以及多个目标重叠或运动轨迹不可预测时难以进行多目标跟踪。这些问题会导致结果解读不准确、系统可靠性降低,并降低自动驾驶、监控和防御系统等应用的效率。要有效解决场景分割问题,需要采用创新方法来提高分割的精度和鲁棒性。
提高空间分辨率以实现更清晰的场景分割
场景分割面临的主要挑战之一是雷达系统的空间分辨率有限,这通常会导致场景中的特征融合或模糊不清。这个问题阻碍了对单个元素进行精确分割。为了解决这个问题,可以采用先进的超分辨率算法,例如利用深度学习神经网络的算法,从粗略的雷达数据中重建更精细的细节。这些方法通过插值缺失信息和锐化边缘,在无需硬件升级的情况下提高了空间分辨率。例如,集成稀疏信号处理技术可以更好地描绘场景组件,从而提高场景分割的可靠性。此外,将雷达与激光雷达等互补传感器相结合的混合方法可以进一步提高分辨率,确保即使在密集的环境中,分割结果也能生成精确的空间图,从而支持目标检测等下游任务。
降低动态场景中的微多普勒特征和杂波
微多普勒特征源于运动物体的细微振动或旋转,它会引入变异性,并通过产生频谱伪影来干扰传统的场景分割。再加上杂波抑制的挑战——环境回波会掩盖目标信号——这会导致误报和分割错误。一种实用的解决方案是采用针对微多普勒特征提取而设计的自适应滤波技术,例如使用小波变换进行时频分析,以将这些特征与主要的多普勒频移分离。对于杂波抑制,空时自适应处理 (STAP) 算法表现出色,它能够动态估计并消除杂波协方差,从而保持目标的完整性。这些方法不仅通过隔离动态元素来改进场景分割,而且还能提高整体信噪比,使系统能够在杂乱的城市或森林环境中稳健运行。
通过改进细分来简化多目标跟踪
多目标跟踪给场景分割带来了巨大的挑战,因为重叠的轨迹和相似的雷达回波常常导致关联错误,进而造成目标丢失或误识别。空间分辨率和杂波等问题会加剧这一挑战。有效的解决方案包括将概率数据关联滤波器集成到分割流程中,该滤波器可以为潜在的目标-场景匹配赋予概率值,从而实时消除歧义。此外,采用基于图的模型进行场景分割可以对目标之间的交互进行建模,其中节点代表检测到的目标,边代表从运动预测中导出的关系约束。通过整合来自跟踪输出的反馈回路来优化分割边界,这些技术在多目标场景下能够实现更高的精度。在实践中,基于不同数据集训练的机器学习框架可以学习处理遮挡和非线性运动,从而确保即使在高密度环境中也能实现无缝跟踪。
通过针对性地运用算法解决方案来应对空间分辨率限制、微多普勒特征干扰、杂波抑制需求以及多目标跟踪复杂性等核心挑战,场景分割得以从瓶颈转变为下一代雷达技术的强大推动力。实施这些策略不仅能够提升性能,还能为各行各业更安全、更高效的应用开辟道路。