









克服多普勒速度检测中的挑战以实现可靠的运动传感
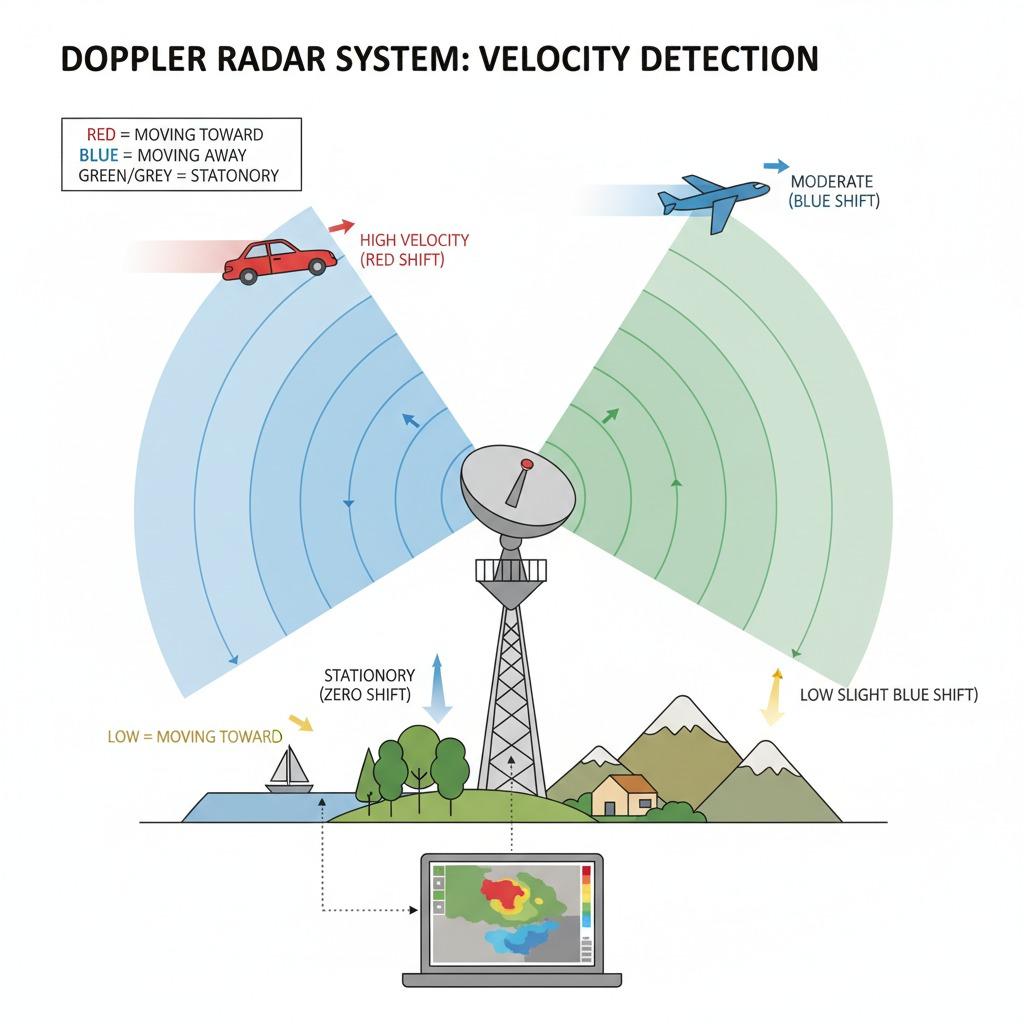
在雷达和传感器技术领域,多普勒速度检测是精确测量运动物体速度和方向的基石。然而,自动驾驶、监控和气象监测等领域的专业人员常常面临诸多挑战。环境噪声、杂乱信号和快速变化的场景都会造成读数不准确,导致检测失败或误报。在动态环境中,区分真实运动和背景静止信号至关重要,因此这个问题尤为突出。如果没有有效的解决方案,依赖多普勒速度检测的系统将面临效率低下和可靠性不足的风险,从而阻碍那些对精度要求极高的应用。
解决运动物体分割中的干扰问题
多普勒速度检测的一大挑战在于如何从大量无关数据中识别出真正的运动目标。运动目标分割技术应运而生,成为一项至关重要的解决方案,它能够帮助系统从雷达回波中识别并提取出相关的运动目标。该技术通过应用先进的算法分析速度剖面,滤除非运动元素,从而提高多普勒信号的清晰度。例如,在交通监控系统中,运动目标分割技术能够确保车辆与路边静止物体之间形成精确的对比,从而提升整体检测精度。将这项技术与多普勒速度检测相结合,不仅可以降低计算负荷,还能显著提升实时性能,使其在高风险场景中不可或缺。
通过清除固定杂物消除噪音
静止杂波,例如固定建筑物或环境回波,经常会干扰多普勒速度检测输出,导致速度估计误差。静止杂波去除技术通过识别并抑制这些静态信号,防止其影响核心检测过程,从而提供了一种有效的应对措施。自适应阈值法或频域滤波等方法可以有效地去除杂波,使系统能够专注于来自运动物体的真实多普勒频移。在实践中,这种解决方案已被证明对城市雷达应用具有变革性意义,因为建筑物和树木会产生持续的噪声。通过实施静止杂波去除,工程师可以获得更清晰的频谱,从而获得更可靠的速度测量结果并减少运行中断。
通过自适应波束成形增强信号质量
动态环境通常会引入方向性变化,从而降低多普勒速度检测精度,导致离轴干扰造成的信号衰减。自适应波束形成技术通过动态调整天线阵列的聚焦方向来解决这个问题,优先处理来自目标方向的信号。该技术能够实时优化波束方向图,抑制旁瓣干扰并增强目标回波,从而提高速度检测精度。自适应波束形成技术在相控阵雷达系统中尤为有效,它能够适应不断变化的环境条件,例如目标轨迹的变化,从而确保性能的稳定性。当与多普勒速度检测技术结合使用时,它可以最大限度地减少角度误差,为无人机导航或军事监视等应用提供可扩展的解决方案。
通过动态场景更新确保响应速度
多普勒速度检测中一个长期存在的问题是其对不断变化的场景的适应能力不足,物体运动或环境的突然变化会导致静态模型失效。动态场景更新通过持续刷新系统对周围环境的理解,并将新数据融入检测框架,从而解决了这一问题。这涉及到速度阈值和背景模型的实时重新校准,从而实现对加速度或减速度的无缝跟踪。在野生动物监测或安全警戒等场景中,动态场景更新可以避免检测盲区,从而持续保持监测能力。最终,它将多普勒速度检测从一个僵化的工具转变为一个灵活、自适应的强大系统。
通过解决这些核心问题——包括运动物体分割、静止杂波去除、自适应波束形成和动态场景更新——多普勒速度检测的效率显著提高。这些解决方案不仅能有效避免常见问题,还能为运动传感技术的创新发展铺平道路,从而确保各行业系统更加安全、智能和高效。