

随着城市交通密度的持续增长,短距离、多车道车辆监控已成为智能交通系统面临的关键挑战。传统摄像头和低分辨率雷达在这些场景下往往表现不佳:车道混行、遮挡、环境干扰以及短距离精度问题都会影响数据的可靠性和执法效果。毫米波雷达利用其高频优势,可以逐一解决这些问题。下文将详细阐述每个关键点。
1. 为什么短距离多车道监控面临挑战
1.1 车道混合
当车辆在相邻车道上近距离行驶时,低分辨率雷达通常无法区分它们,导致速度或乘员统计数据不准确。
1.2 环境干扰
雨水、雾气、光线不足、阴影或道路反射都会降低摄像头的可靠性。低端雷达也可能由于多径反射而产生误报或漏检目标。
1.3 近距离精度
传统雷达针对远距离(200米以上)进行了优化,但在20-30米处距离和速度精度会下降,导致难以逐车道区分。
2. 毫米波雷达如何解决这些问题
2.1 高精度测距分辨率
毫米波雷达使用76–81 GHz 的 FMCW 信号,带宽通常为 4–5 GHz,可达到厘米级的测距精度。
详细说明:4 GHz 带宽下,距离分辨率约为 3.75 厘米,可以清晰地区分长度约为 4 米的车辆,防止测量重叠。
实用技巧:工程师可以根据车道宽度和目标距离调整雷达带宽,以优化短距离多目标分离。
2.2 精细角度分辨率
使用MIMO 天线阵列,毫米波雷达可以形成角度分辨率低至 2-3° 的窄波束。
说明:每条车道都可以映射到雷达角度坐标,即使车道之间只有 3 米的距离,也能实现车辆的清晰分离。
实施提示:增加天线通道的数量可以进一步提高密集交通环境下的分辨率。
2.3 多普勒速度测量
毫米波雷达通过多普勒效应直接测量速度,避免了因遮挡或光照条件而导致的误差,这些误差会影响基于视频的速度计算。
详细解释:即使是紧密平行的车辆也会产生独立的速度读数。
应用:速度阈值可以区分静止车辆、慢速车辆和快速车辆,有助于优化交通信号和检测违章行为。
2.4 ROI(感兴趣区域)配置
每条车道都可以有专门的 ROI,确保雷达只在指定区域内进行探测,防止交叉车道干扰。
说明:ROI 可以是多边形或网格状,精确覆盖车道,排除行人或障碍物区域。
优化:利用初始点云数据和现场测量数据调整 ROI 边界,以防止漏检或误检。
3. 实际应用
3.1 城市交叉路口
挑战:多条车道,车辆间距狭窄,公共汽车或大型卡车阻挡小型汽车。
优势:逐车道跟踪为自适应交通信号灯提供可靠的占用率和速度数据。
部署技巧:略微向下倾斜 10-15° 可减少地面和障碍物反射干扰。
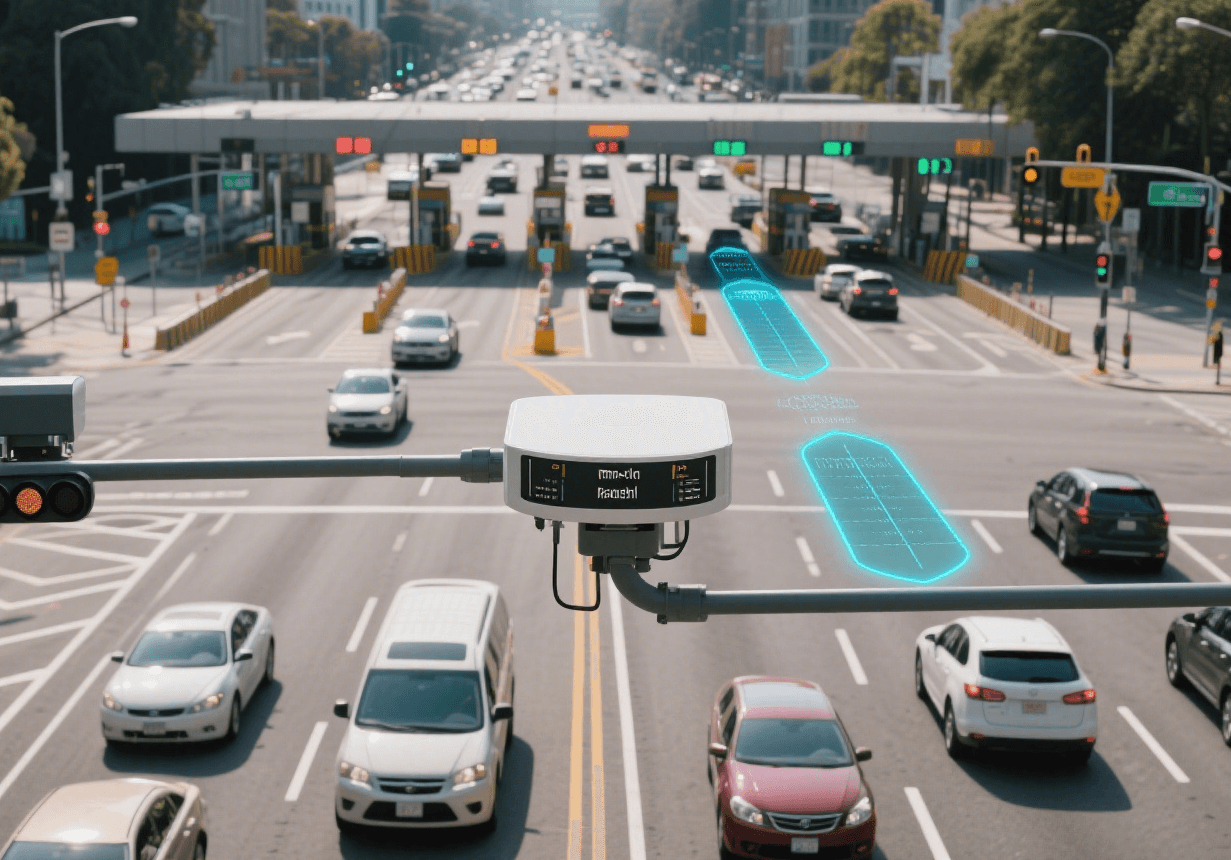
3.2 收费站和高速公路匝道
挑战:速度和尺寸各异的车辆。
优势:高分辨率雷达能够进行多车道分类和精确的速度测量,避免将低速车辆混入高速数据中。
实施:为每个车道 ROI 分配单独的速度阈值和占用逻辑。
3.3 智能交通执法
挑战:持续、全天候监测,检测各车道的违规行为。
优势:雷达利用多普勒和角度信息的组合来识别车辆,从而支持执法和数据分析。
4. 安装与部署建议
安装高度:2.5-3.5米,取决于车道宽度和车道数量。
倾斜角度:向下倾斜 10–15°,以减少地面杂波。
光束配置:调整水平视场角以独立覆盖每个车道。
ROI 校准:使用点云数据和真实车辆轨迹,确保完全覆盖车道且无重叠。
数据输出:支持 RS485、CAN 或以太网接口,可与 ITS 系统连接,提供每车道的速度和占用率信息。
5. 常见问题解答
问题1:毫米波雷达可以在雨雾天气下工作吗?
A1:是的。毫米波雷达穿透雨雾的能力很强,比摄像头或光学传感器性能更稳定。
Q2:相邻车道的车辆会混行吗?
A2:高角度分辨率结合 ROI 配置可有效分离相邻车道上的车辆。
Q3:哪些车道宽度适合部署雷达?
A3:每个 ROI 使用 3-4 米的标准车道效果很好;更宽的车道可以分成多个 ROI 或调整光束配置。
Q4:如何保证近距离射击精度?
A4:通过调整带宽、CFAR阈值、帧集成,以及优化安装角度和天线布局,20-50米处的检测仍然准确。
Q5:雷达如何与现有的智能交通系统集成?
A5:它支持 RS485、CAN 或以太网输出,直接向交通管理系统提供特定车道的速度、占用率和分类数据。
6. 部署注意事项
天线和雷达的数量:对于多车道的情况,可能需要多单元阵列来确保对每条车道进行独立检测。
安装位置:最好将电线杆安装在十字路口、收费站或匝道两侧,以便视野开阔。
ROI 设置:使用初始点云和现场测量数据精确校准 ROI 边界。
系统调优:根据交通速度和密度调整 CFAR 参数和多目标跟踪算法,以最大限度地减少误报和漏检。
维护:虽然雷达在各种天气条件下都很可靠,但定期检查天线和信号处理单元可确保其长期可靠性。
7. 结论
毫米波雷达具有高精度测距、精细角度分辨率、多普勒速度测量和精确的 ROI 配置等特点,有效解决了短距离、多车道监测难题。
在城市十字路口、收费站和智能交通执法场景中,毫米波雷达提供可靠的数据,支持交通管理、执法和流量分析。
通过结合适当的安装高度、倾斜角度、波束配置和 ROI 校准,可以充分发挥雷达性能,实现每车道、全天候、高精度的交通监控。
👉 了解更多关于 Linpowave 雷达解决方案的信息: Linpowave V200 雷达