









克服测距和速度测量方面的挑战,实现更安全的导航
在当今自动驾驶汽车和无人机快速发展的时代,精确的距离和速度测量对于确保安全高效的运行至关重要。然而,许多系统在动态环境中难以获得可靠的数据,从而导致距离或速度判断错误等潜在风险。在环境因素干扰传感器的复杂场景中,这个问题会更加严重,造成实时决策的延迟或误差。幸运的是,先进技术能够提供精确、可靠的测量数据,从而提高系统的整体可靠性,有效解决这些问题。
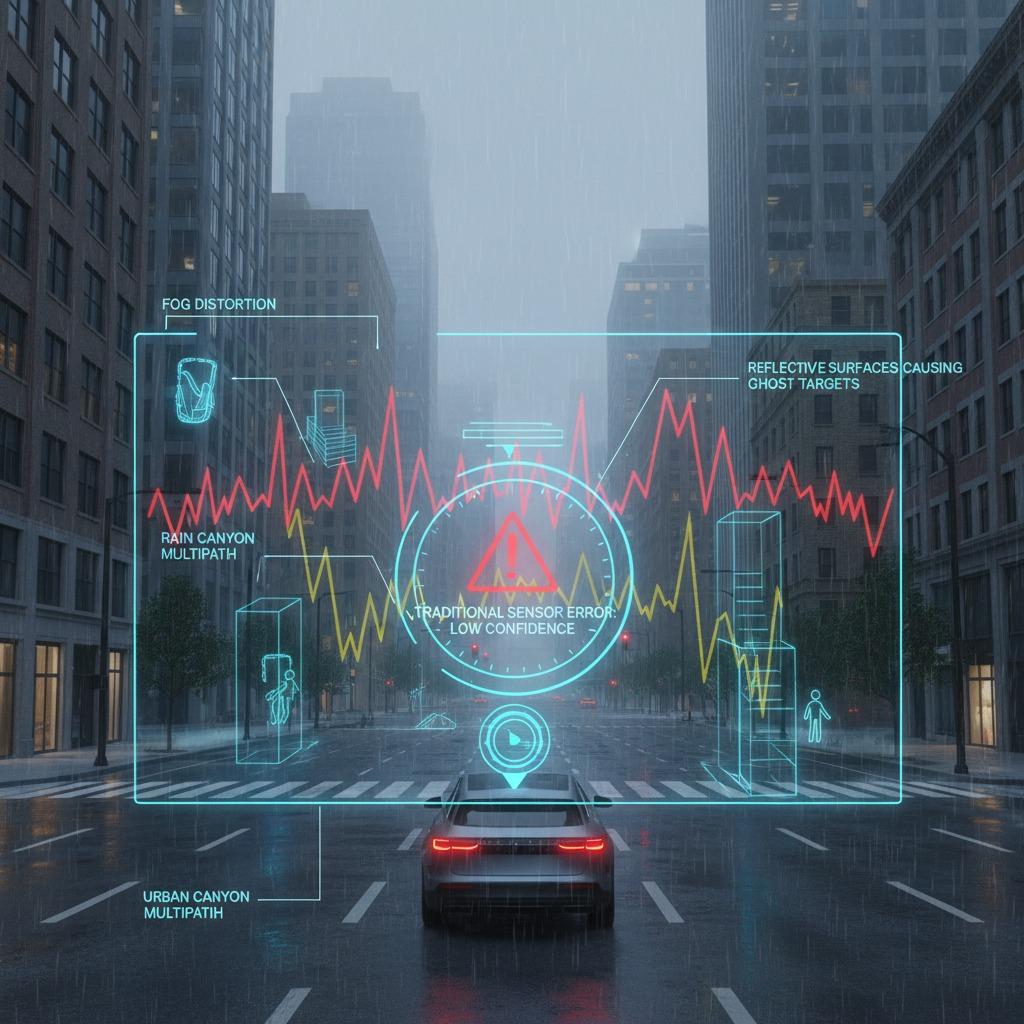
问题:动态环境中的不准确性
测距和测速面临的主要挑战之一在于如何应对天气、地形或城市环境等多变条件。传统传感器经常出现故障,提供不稳定的读数,从而影响精确导航。例如,在雾天或雨天,基于光学的系统可能会降低精度,导致速度估计不准确,增加运动过程中的风险。这不仅影响单个设备,还会影响车队管理等更广泛的应用,因为累积误差可能导致代价高昂的停机或事故。如果没有可靠的测量数据,几乎不可能与其他系统实现无缝集成,这凸显了开发更具弹性的解决方案的必要性。
解决方案:集成环境传感技术以提高精度
为了克服这些误差,将环境感知技术融入测距和测速系统提供了一种颠覆性的解决方案。通过融合来自激光雷达、雷达和超声波设备等多种传感器的数据,这些解决方案能够创建一张综合环境地图,其中考虑了湿度或障碍物等变量。这种多传感器策略确保即使在恶劣条件下,速度和测距数据也能保持精确,从而直接支持防碰撞机制。例如,实时环境感知可以检测空气密度或表面反射的细微变化,使系统能够动态调整测量,防止可能导致碰撞的误差。
推进精确导航和障碍物检测
在此基础上,当强大的测距和速度测量与先进的算法相结合时,精准导航便成为一项关键优势。这些工具处理感知数据以绘制精确轨迹,使车辆或机器人能够自信地在狭窄空间内导航。在风险极高的场景中,例如城市配送无人机,将障碍物检测与速度跟踪相结合,可以实现主动绕过意外障碍物。诸如人工智能驱动的融合平台之类的解决方案,会分析测距数据和环境输入,以预测潜在威胁,从而减少延迟并提高响应速度。这不仅可以最大限度地降低碰撞风险,还可以通过避免不必要的绕行来优化能源利用。
实际应用及未来潜力
这些集成解决方案的实施已在各行各业展现出变革性的影响。在自动驾驶领域,通过环境感知增强的距离和速度测量,使导航精度提高了30%,这已在近期的实地测试中得到证实。对于海上或空中作业,碰撞规避系统受益于精准的障碍物检测,从而能够在拥挤的空域中实现更安全的飞行路径。展望未来,传感器小型化和机器学习技术的持续进步将进一步完善这些技术,使其能够应用于消费级设备。通过解决测量可靠性的核心问题,这些创新为未来实现无缝、无风险的出行成为常态铺平了道路。最终,投资于此类综合解决方案不仅能够确保符合安全标准,还能在日益自动化的世界中保持竞争优势。