








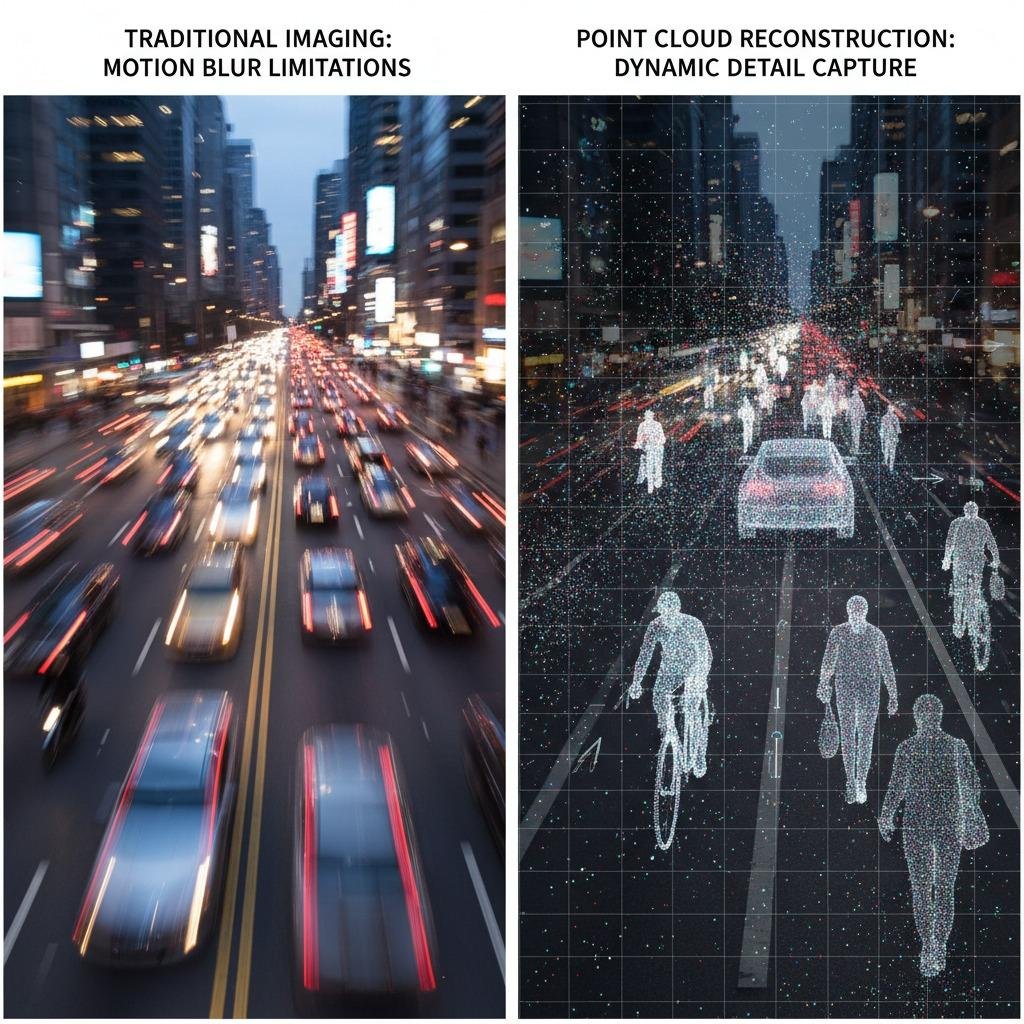
动态环境捕捉的挑战
在瞬息万变的自主系统和机器人领域,如何精确捕捉和解读动态环境是最大的挑战之一。传统的成像方法在处理运动物体时往往力不从心,导致数据不完整和决策不可靠。点云重建技术应运而生,成为一项关键技术,能够从分散的数据点创建精细的三维模型。然而,如果不能将先进技术进行有效整合,运动模糊和覆盖稀疏等问题依然存在,难以在自动驾驶汽车或监控无人机等应用中实现实时精度。
集成微多普勒分析以增强运动检测
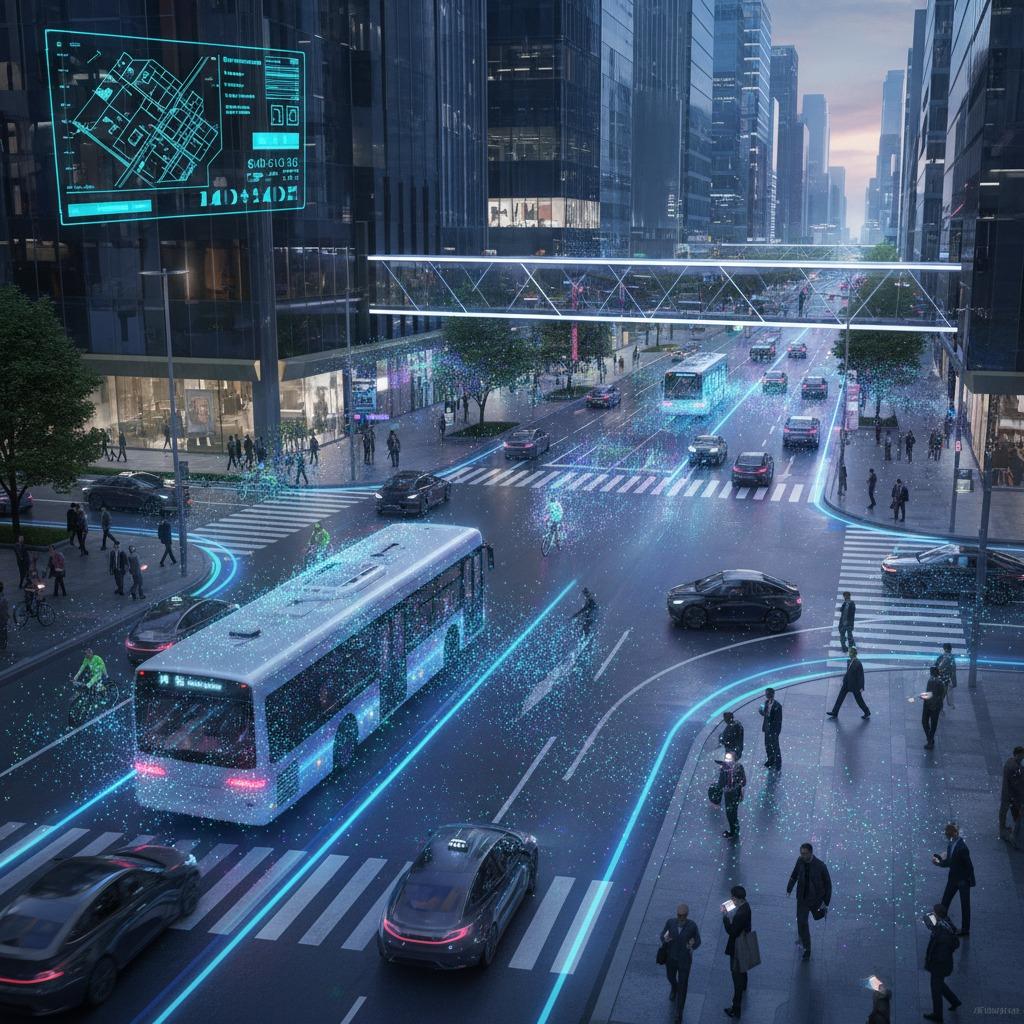
为了克服动态场景捕捉的局限性,将微多普勒分析融入点云重建提供了一种强有力的解决方案。微多普勒分析着重于物体运动部件(例如无人机的旋转叶片或行人的肢体)引起的细微频率变化。通过将这种基于雷达的洞察与点云数据融合,系统能够更好地区分静态和动态元素,从而减少重建过程中的误报。例如,在城市环境中,这种融合能够更精确地模拟交通流,而传统的点云重建方法可能会忽略物体轨迹的快速变化。这种方法不仅提高了重建点云的密度和质量,还增强了系统对环境噪声的整体鲁棒性。
利用动态目标跟踪进行实时重建
点云重建的另一个关键挑战在于如何在跨帧跟踪运动物体时保持数据的连续性。动态物体跟踪通过使用算法,利用速度和加速度数据预测并更新物体位置,从而解决了这一难题。当与点云重建相结合时,它可以确保三维地图随着物体的移动而无缝演进,避免数据流出现断点。例如,考虑一个在杂乱通道中穿行的仓库机器人:如果没有动态跟踪,重建的点云可能会错误地反映不断变化的库存,从而导致碰撞。通过实施预测跟踪模型(例如针对三维数据优化的卡尔曼滤波器),重建过程将更具自适应性,从而生成高保真模型,支持更安全、更高效的操作。
利用探测和测距技术克服障碍
障碍物检测和测距是另一个痛点,尤其是在非结构化环境中,突发的碎片或野生动物等因素可能会干扰作业。点云重建结合激光雷达或雷达测距,可以提供识别和精确绘制这些障碍物所需的深度感知信息。解决方案在于多传感器融合,利用测距数据优化点云,实时突出显示潜在危险。例如,在农业机器人领域,该方法可以重建田间布局并检测移动的动物,从而使机器能够动态调整路径。通过在重建流程中优先处理障碍物检测和测距,系统可以提高可靠性,最大限度地减少停机时间和操作风险。
实现全面的三维环境测绘
最终,应对这些挑战的最终目标是实现强大的三维环境测绘,将所有要素整合起来,形成整体视图。点云重建是其核心,而微多普勒分析、动态目标跟踪以及障碍物检测和测距技术的集成则产生了协同效应。这种综合方法将原始传感器数据转化为可操作的三维地图,并能实时适应变化。例如,在搜救场景中,配备这些技术的无人机可以重建灾区,通过微多普勒特征跟踪幸存者的移动,并通过精确测距避开障碍物。最终形成了一种可扩展的解决方案,它不仅解决了当前的重建问题,还为先进的人工智能驱动的自主飞行铺平了道路,确保在复杂的现实世界环境中实现更安全、更高效的导航。
通过采用这些综合策略,各行业可以克服环境数据不完整或过时的弊端,充分发挥点云重建在创新应用中的潜力。