









为什么场景分割在雷达和传感工作流程中至关重要
场景分割正逐渐成为传感项目从实验室演示走向实际应用时随处可见的术语之一。简单来说,它是将传感器场景分割成若干有意义的区域,以便系统能够解读每个区域中发生的情况。这听起来似乎很理论化,但当你是一名工程师,需要确保雷达在车流、树叶、机械设备或拥挤的工业区等环境中保持稳定运行时,就会发现它的重要性。这时,问题就变成了如何在不丢失太多细节的情况下,将可用目标与背景活动区分开来。
对于产品团队而言,答案会影响系统性能、计算负载以及分类或跟踪所需的下游逻辑量。对于采购经理而言,它通常会改变组件组合以及成本与功能之间可接受的权衡。如果传感器无法将场景充分分离以供后续应用程序使用,那么即使它检测到了“某些东西”,也是不够的。
核心挑战:细节越多,噪音通常也越多。
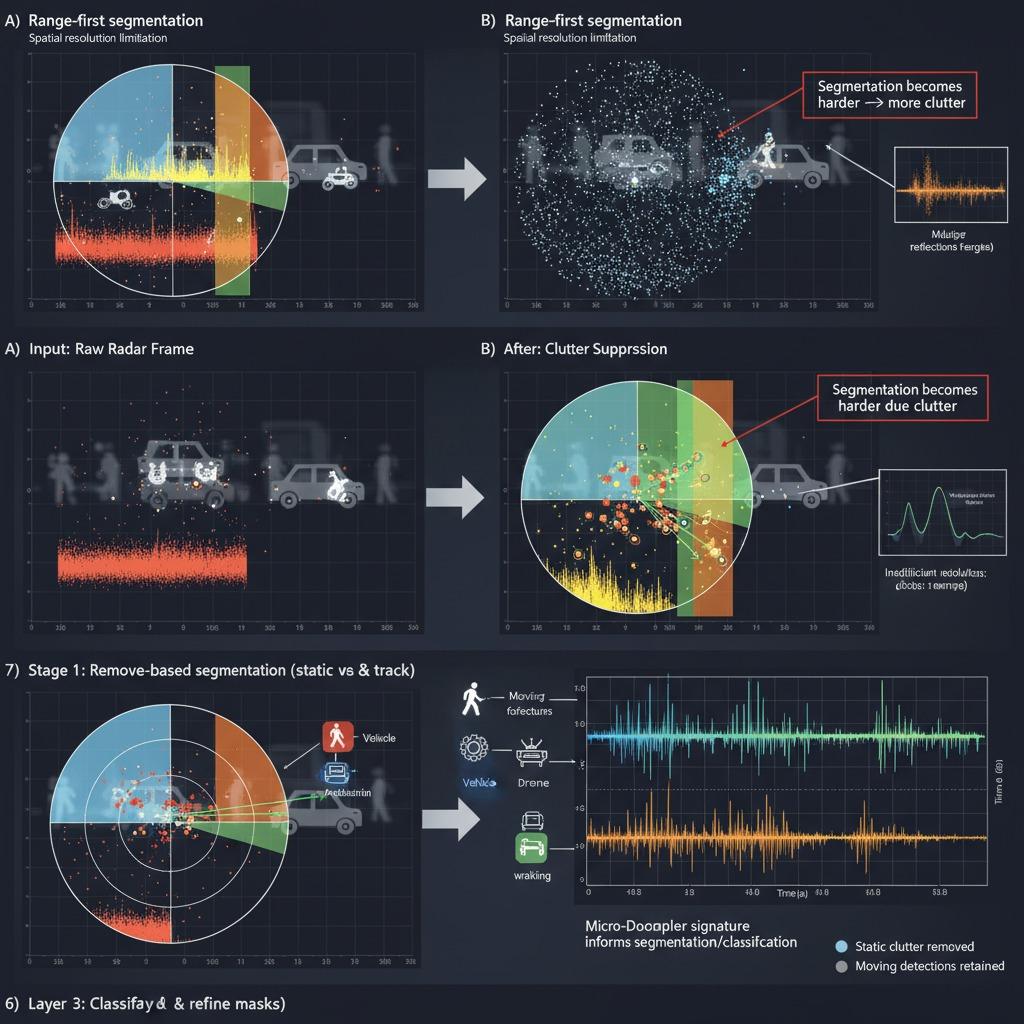
许多传感系统面临的难题都一样。我们希望获得更高的空间分辨率,以避免近距离物体模糊不清,但更高的分辨率也意味着系统会接收到更多杂乱信号、更多虚假结构和更多明显的运动。这反而使分割变得更加困难,而不是更容易。
在基于雷达的应用中,这一点尤为重要,因为杂波抑制可以决定输出信号是有效还是仅仅杂乱无章。来自墙壁、地板、潮湿表面、传送带或车辆的背景反射可能会主导回波信号。良好的分割方法有助于系统分离出场景中重要的部分,而不是让每个下游算法都去处理同一团杂乱的点云或距离-多普勒图。
需要注意的是:许多项目低估了部署后环境的变化程度。即使硬件完全相同,受控的测试环境和实际生产线也截然不同。
场景分割如何帮助系统做出决定
从宏观层面来看,场景分割支持对工程师和买家都至关重要的三个决策。
它有助于确定物体的位置。这是最显而易见的功能,但这仅仅是开始。
它有助于区分物体类别或运动模式。在某些应用中,微多普勒特征可以提供有用的线索,帮助我们了解物体的运动方式,例如它是在旋转、行走、振动,还是仅仅穿过视野。
它有助于在多个目标同时出现时保持跟踪的连续性。正因如此,多目标跟踪变得更加可靠,因为跟踪器不会不断受到合并检测或重叠回波的干扰。
常用方法及其适用场景
范围优先分割
当场景中目标与背景之间有足够的距离时,基于距离的分割通常是最简单的方法。它最适用于物体分布在不同距离且系统空间分辨率足以胜任的情况。缺点显而易见:如果场景密集,仅靠距离分割可能不够。
基于运动和特征的分割
当静止杂波成为主要问题时,运动线索可以提供帮助。在雷达系统中,这可能涉及将静态结构与运动物体分离,然后通过特征分析来优化结果。这可以提高杂波抑制效果,但也会提高软件的计算能力。
混合方法
在许多实际部署中,最佳方案并非单一方法,而是分层方法。首先,去除明显的背景元素;然后,利用运动、形状或特征特征对场景进行二次处理。当场景复杂或系统需要在不断变化的环境下保持稳定输出时,这额外的步骤往往能带来显著的效益。
工程师和采购团队的选拔标准
如果您正在评估传感平台或分割流程,请直接提出几个问题。
背景改变时,它的效果如何?
对于你关心的物体,实际需要的空间分辨率是多少?
它能否在不引入过多错误分割的情况下分离相邻对象?
它是否保留了足够的信息以供下游多目标跟踪?
它需要多少计算能力?这种计算能力在边缘计算环境下是否可以接受?
这些问题至关重要,因为分段不仅仅是一项软件功能,它还会影响整个系统架构。更强大的算法可能需要比最初物料清单预期更高的前端数据质量、更严格的时序控制或更多的内存。
导致项目进度缓慢的常见错误
一个常见的错误是假设强大的分类器能够修复分割不佳的问题。通常情况下,它并不能。如果场景本身没有被清晰地分割,分类器就会继承这种混淆。
另一个常见的错误是只针对单一测试场景对系统进行调优。这在演示中可能看起来不错,但在实际部署中却会悄无声息地失败。工程师们通常凭直觉就能意识到这一点;问题在于,进度压力可能会让他们忽略这个问题。
第三个问题是直到项目后期才考虑杂波抑制。到那时,团队可能已经完成了传感器布局、外壳设计或处理硬件的开发,这使得杂波清理变得困难。
买家须知:购买前应该问些什么
要求提供系统在与实际应用场景相似的场景中的表现证据,而不仅仅是经过精心修饰的实验室视频。如果应用场景涉及密集环境,请要求查看系统如何处理重叠物体和背景反射。如果应用场景依赖于运动分析,请评估微多普勒特征在您关注的条件下是否可用。
此外,要求供应商清晰解释分割流程在每个阶段的具体操作也很有帮助。如果供应商无法解释场景是如何分割的,那么该系统可能比表面看起来更脆弱。
常问问题
场景分割技术是否仅用于雷达?
不,它被广泛应用于传感和视觉系统中。雷达应用面临着特殊的挑战,因为杂波和运动信号难以区分,但其基本原理更为广泛。
更高的空间分辨率是否总能改善分割效果?
并非总是如此。更高的空间分辨率可以展现更多细节,但也会增加复杂性和杂乱感。合适的分辨率水平取决于具体应用。
市场细分最重要的结果是什么?
可靠的下游决策。如果分割能够帮助系统更一致地检测、分类或跟踪物体,那么它就发挥了应有的作用。
实际的下一步
如果您正在比较不同的传感方案或审查现有设计,请从场景本身入手。绘制背景图,标出目标密度、运动模式以及您预期的杂乱程度。然后测试在比演示环境更杂乱的条件下,分割方法是否仍然有效。这一步通常可以节省后续大量的工程时间。