

Blog List
ホーム
Blog List

Linpowave を使用して、世界中の視聴者との信頼、忠誠心、収益性の高い関係を構築します。

1. 複雑な空域運用がなぜ異なる工学的問題なのか 2. 購入者が契約前に通常分離する必要があるもの 3. 感知・回避システム設計が最も効果を発揮する場面 4.パンフレットの文言よりも重要な選考基準 5. 調達と統合におけるよくある間違い 6. エンジニアリングチームと調達チームのための実践的な購買アドバイス 7. よくある質問 8. 購入者の次のステップ
 Ningbo Linpowave
Ningbo Linpowave
1. GNSSが利用できない状況下での信頼性が、なぜ真の設計要件となったのか 2. GNSSが途絶えた場合、何が起こるのか 3.購入者が比較検討すべき主要な機能分野 4.実際の調達において重要な選定基準 5. 購入者がよく犯す間違い 6. エンジニアリングおよび調達チーム向けの実践的な購買アドバイス 7. 次のステップとして役立つこと
Ningbo Linpowave
1. 非視線センシングが研究テーマから購買決定へと移行している理由 2. 根本的な課題:あらゆる反射を鵜呑みにすることなく、雑然としたものを見抜くこと 3. 購入者が最初に比較すべきこと 4. NLOSセンシングが最も効果を発揮する場所 5. 後々トラブルの原因となるよくある買い物ミス 6. エンジニアおよび調達チーム向けの実践的な選定アドバイス 7.よくある質問:調達中に発生する質問 8. 次のステップ
Ningbo Linpowave
1. 実際のレーダー運用において、なぜ偽追跡対策が重要なのか 2. 実践的な簡単な見地:偽追跡は通常どこから発生するのか 3. トラッキングチェーンが何をしようとしているのか 4. システムを盲目にすることなく偽追跡を減らす方法 5. 見出しの仕様よりも重要な選定基準 6. 購入者が犯しがちなよくある間違い 7. 調達前に尋ねるべき質問 8. FAQ:偽追跡対策を平易な言葉で解説 9. より良い購入アプローチ
Ningbo Linpowave
1. ドローンチームが1つの機器のように動作する必要がある場合 2. 分散型センシングネットワークが解決しようとしている問題 3.購入者が評価すべき主要機能 4. 現場で重要な選考基準 5. 調達と統合におけるよくある間違い 6. エンジニアリングチームと調達チームへの実践的なアドバイス 7. この決定によって回避できること
Ningbo Linpowave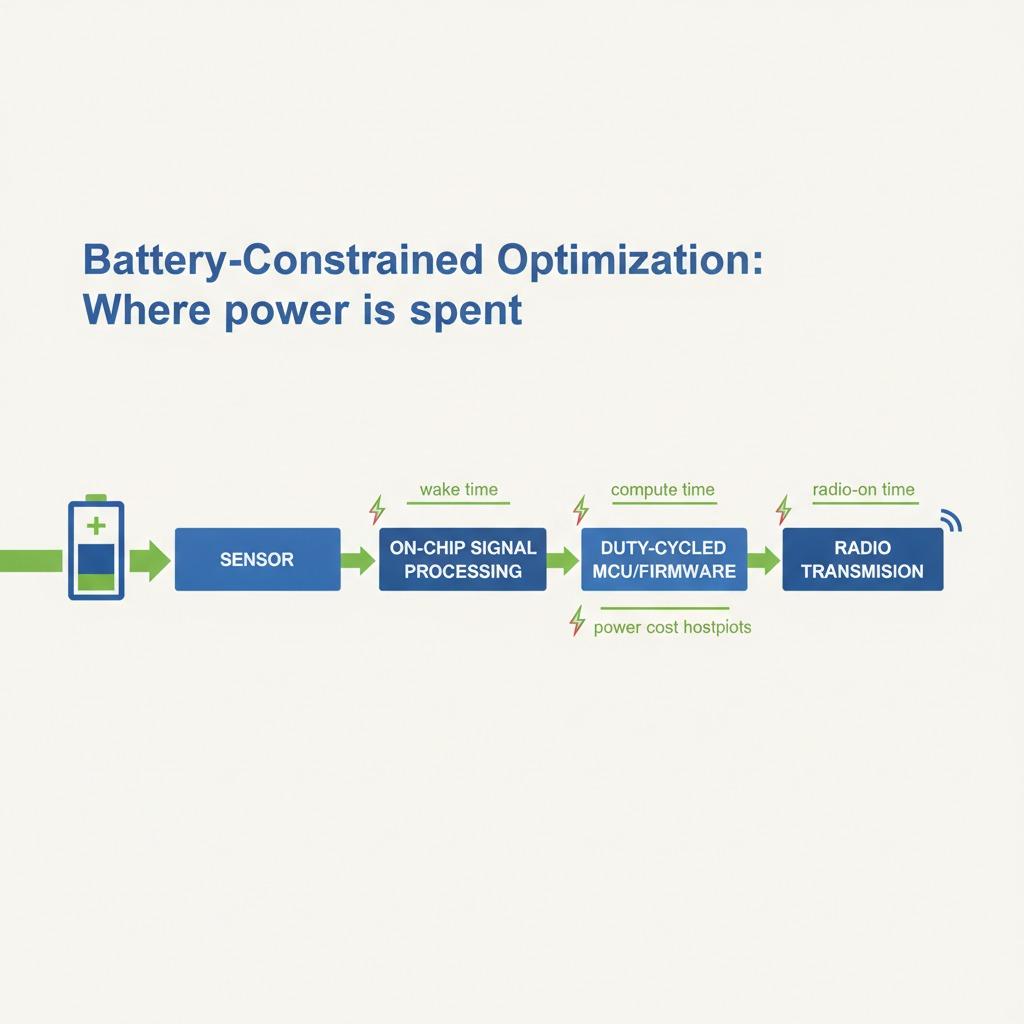
1. バッテリー寿命が単なるメンテナンス上の問題ではなく、設計上の制約となった理由 2. 電力予算が本当に伝えようとしていること 3. 最大の利益が通常得られる場所 4. 低消費電力チップセット設計は重要だが、それだけで全てが解決するわけではない。 5. エンジニアと購入者が考慮すべき選定基準 6. 実行時間を短縮するよくある間違い 7. 実用的な購入者向けアドバイス 8. よくある質問:初期段階でよく寄せられる質問 9. 賢明な次のステップ
Ningbo Linpowave
1. 実際のレーダーおよびセンサープログラムにおいて、なぜ誤追跡軽減が重要なのか。 2. 現実的なトレードオフ:クリーンなトラックと機会損失 3. 誤った軌道を描く原因として一般的なものは何ですか? 4. 誤った情報を減らすための簡単な購入者チェックリスト 5. 購入者がよく犯す間違い 6.合理的な評価プロセスとはどのようなものか 7. よくある質問 8. 次のステップ
Ningbo Linpowave
1. なぜ信号品質はデータの問題だけでなく、設計上の問題になりつつあるのか 2. SNR問題が通常発生する場所 3. 実際のシステムでSNRを向上させるものは何か 4. 簡単な比較:利益は通常どこから得られるのか 5. 購入者が見落としてはならない選定基準 6.プロジェクトの進行を遅らせるよくある間違い 7. 実用的な購入者向けアドバイス 8. この記事は、あなたがどのような決断を下すのに役立つはずですか? 9. よくある質問 10. 次のステップ
Ningbo Linpowave
1. 状況が悪化したときに、堅牢なセンシングが重要な理由 2. 実務上の問題:優れたセンサーが劣悪な環境で機能しなくなった場合 3. 堅牢なセンシングに通常必要なもの 4. 購入者はどのように選択肢を比較すべきか 5. 脆弱なシステムを生み出すよくある間違い 6. 実用的な購入者向けアドバイス 7. 堅牢なセンシングが効果を発揮する場面 8. 契約する前に確認すべきこと
Ningbo Linpowave
1. 複雑な空域運用がなぜより困難な工学的問題になりつつあるのか 2. システムが現場で解決しなければならないこと 3.購入者が注目すべきコア機能 4. マーケティングに惑わされずにソリューションを比較する方法 5.後になって明らかになる、購入者にとっての落とし穴 6.優れた選考プロセスとはどのようなものか 7. よくある質問:評価チーム向けの簡単な回答 8. エンジニアリングチームと調達チームの次のステップ
Ningbo Linpowave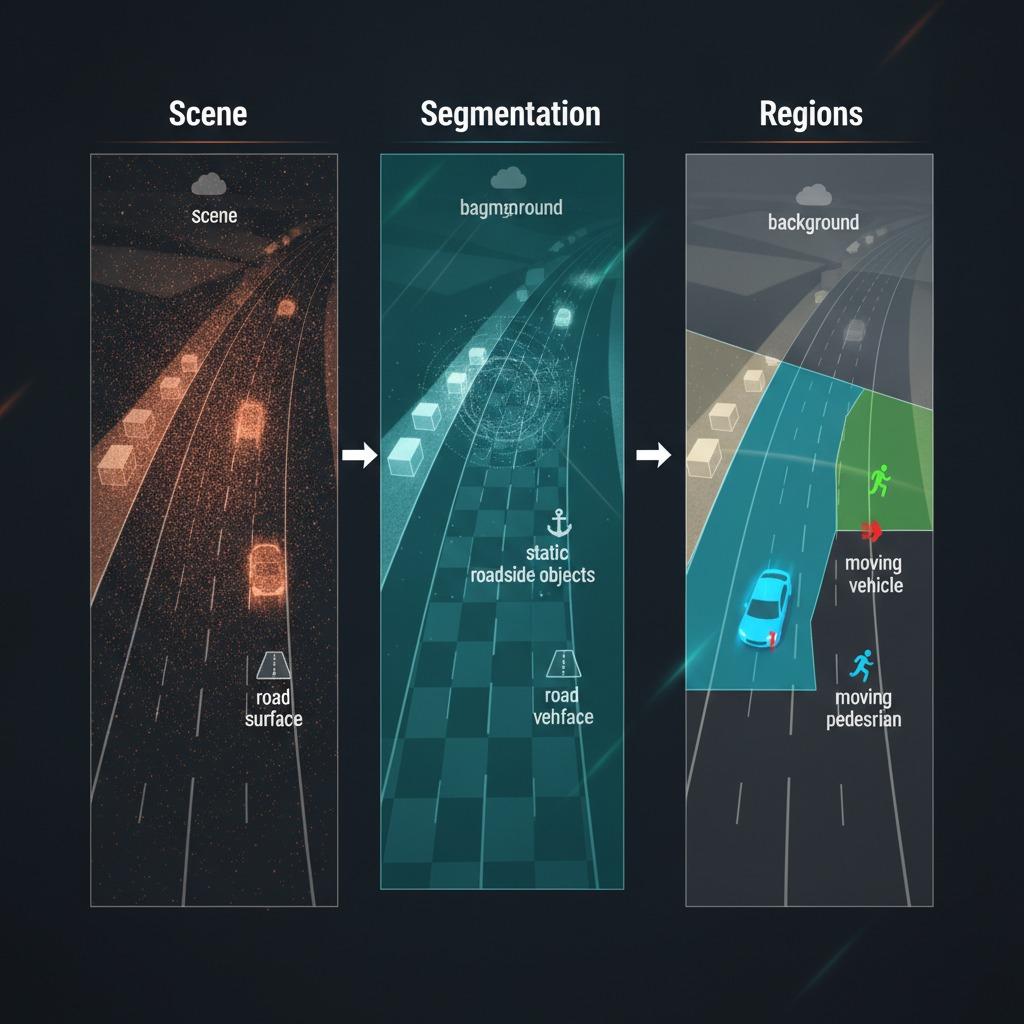
1. センシングおよび知覚システムにおいてシーン分割が重要な理由 2. 実務上の問題:生データはめったに読み取れない 3. セグメンテーションはシステムが判断を下すのに役立ちますか? 4. セグメンテーションの品質を左右する主要な技術的要因 5. 購入者はセグメンテーション手法をどのように比較すべきか 6. 弱いセグメンテーションを生み出すよくある間違い 7. 購入または統合前に確認すべき事項 8. 購入者の要点 9. エンジニアリングチームの次のステップ
Ningbo Linpowave
1. ドローンが単独で動作しなくなったときに、分散型センシングネットワークが重要になる理由 2. このアーキテクチャはどのような問題を解決しようとしているのか 3. クイックリファレンス:購入者が注目すべき点 4. 分散センシングが艦隊の行動をどのように変えるか 5.パンフレットでは十分に説明されていない、より詳細な選考基準 6. 購入者がよく犯す間違い 7.これが製品開発チームと調達チームにとって何を意味するのか 8. 次のステップ
Ningbo Linpowave