








Blog List
ホーム
Blog List

Linpowave を使用して、世界中の視聴者との信頼、忠誠心、収益性の高い関係を構築します。

1. リソースを考慮した計算オフロードが今重要な理由 2.核心となる決定:何を直ちに行うべきか? 3. 分散型構成が実際に改善できること 4. 機内処理がその価値を発揮する場面 5. レーダーやセンサーを多用するシステムは良い例です 6. エンジニアが使用すべき選定基準 7.高額な再設計費用につながるよくある間違い 8. 実用的な購入者向けアドバイス 9.次にすべきこと

1. レーダーおよびセンシングワークフローにおいて、適応型閾値調整が重要な理由 2. AIによる適応型閾値調整の実際の動作 3. このアプローチが効果を発揮する傾向にある場合 4. エンジニアが注目すべき主要な実装上の選択肢 5. AIを活用した閾値設定を採用する際のよくある間違い 6. 導入前にソリューションを評価する方法 7.調達チームと製品チームのための実践的なヒント 8. よくある質問 9. 次のステップ

1. 救助活動において迅速な展開が重要な理由 2. 運用上の問題:信号品質を損なわずに高速化を実現する 3. 最良の迅速展開ツールが確認すべきこと 4. 購入者と対応チームにとっての重要なポイント 5. 現場で重要な選考基準 6. 購入者がよく犯す間違い 7.行政機関の意思決定者への実践的なアドバイス 8. 実際の救助活動を支援する装備を選択する 9. よくある質問

1. 害虫の発生が目に見えるようになる前に、害虫の移動経路を追跡することが重要な理由 2. 害虫の移動追跡はどのような問題を解決しようとしているのか 3. センシングスタックについて考える簡単な方法 4.実際に重要な選考基準 5. チームがよく犯す間違い 6. エンジニアリングおよび調達チーム向けの実践的な購買アドバイス 7. よくある質問 8.次にすべきこと

1. GPSが利用できない都市部でのナビゲーションが依然として困難な工学的課題である理由 2. 都市で何が問題なのか 3.重要な決定ポイント:実際にどのような都市型ナビゲーション性能が必要ですか? 4. 一般的なアプローチ 5. 製造現場と調達において重要な選定基準 6.購入者が今でも犯しがちなよくある間違い 7. 都市部への導入に関する実用的な購入者向けアドバイス 8. よくある質問 9.次にすべきこと

1. 製品出荷前に信頼性と再現性テストが重要な理由 2. このテストが本当に証明しようとしていること 3. パフォーマンス指標の定義から始めないと、後々混乱が生じる。 4. シナリオベースのシミュレーションを計画に含めるべき理由 5.真実とのベンチマーク:全員の誠実さを保つためのチェック 6. フィールドテスト方法論:ラボでの信頼性と実際の使用状況との融合 7. 効果的な信頼性プログラムを構築する方法 8. 購入者とエンジニアが注意すべきよくある間違い 9. 実用的な購入者向けアドバイス 10.良い決断とはどのようなものか
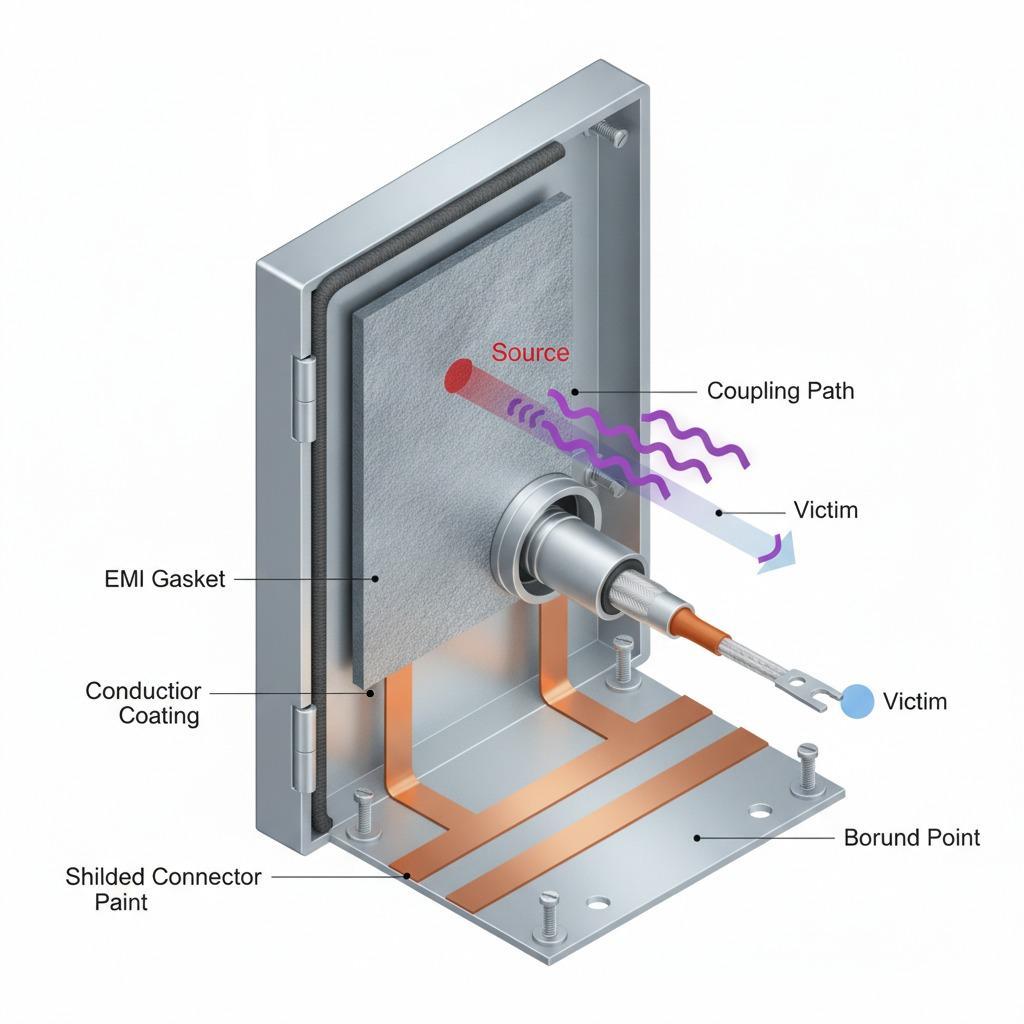
1. EMIシールドが仕上げではなく設計上の課題となった理由 2. EMIシールドが実際に解決しようとしていること 3. 一般的な遮蔽方法とその適用箇所 4. 適切な遮蔽戦略の選択方法 5. 回避可能な手戻り作業を引き起こすよくあるミス 6. 製品チームが購入前に尋ねるべきこと 7. よくある質問:購入者からの簡単な質問 8.実践的な次のステップ

1. 持続的な広域監視:購入者が本当に解決しようとしていること 2. 継続的なモニタリングがうまくやらなければならないこと 3. 一般的な技術アプローチとその適用範囲 4. 現場で重要な選考基準 5. 購入者がよく犯す間違い 6. 実用的な購入者向けアドバイス 7. この先どうなるのか
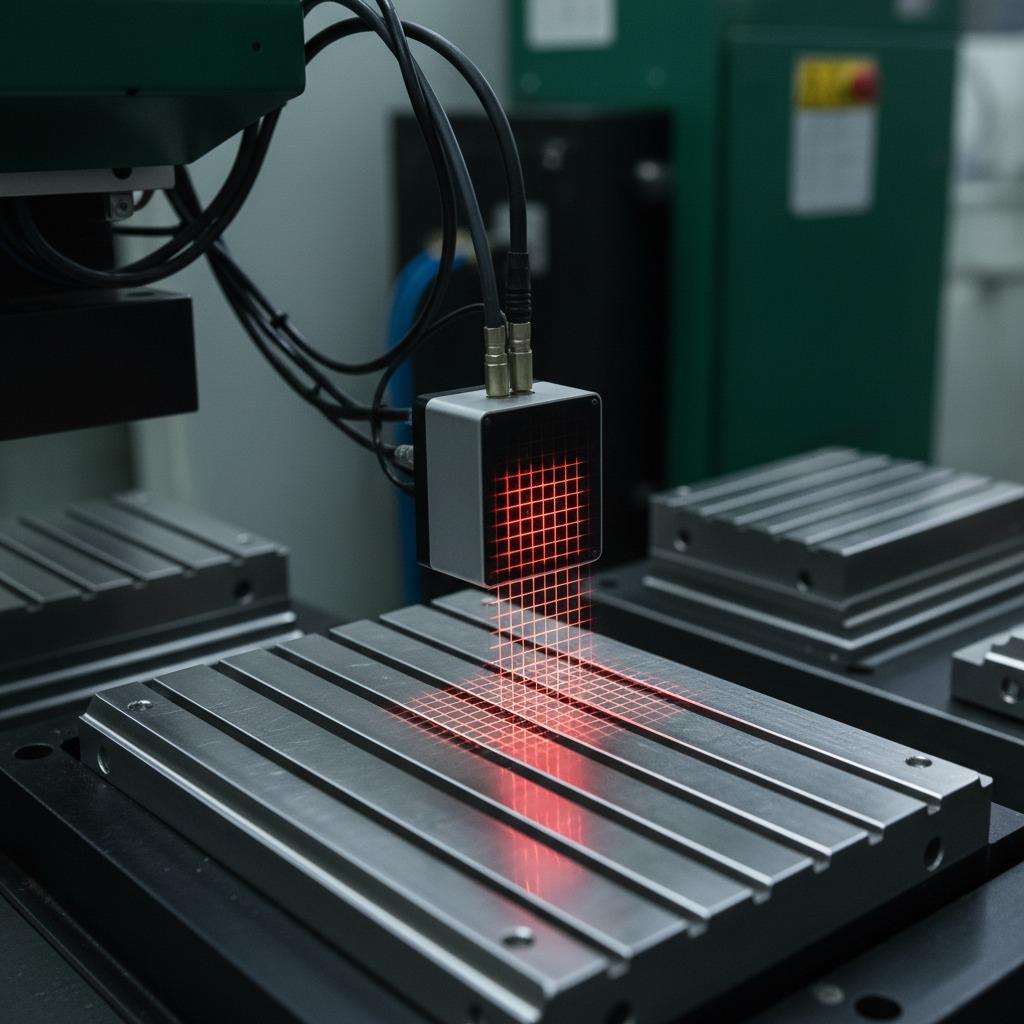
1. 実際の生産現場において、短距離高精度センシングが重要な理由 2. この技術はどのような問題を解決するために開発されたのか 3. トレードオフが通常現れる場所 4. 購入者がよく犯す間違い 5. 実際の購買プロセスにおいてソリューションを評価する方法 6. よくある質問:よくある質問 7. エンジニアと調達チームの次のステップ

1. フィールドマッピングにおいてデジタル標高モデル生成が重要な理由 2. DEMが意思決定に役立つこと 3. DEM生成が2Dマップとどのように異なるか 4. 地形および表面モデリングで使用される主要な手法 5.実際に重要な選考基準 6.購入者が避けるべきよくある間違い 7. 実用的な購入者向けアドバイス 8. よくある質問 9.次にすべきこと
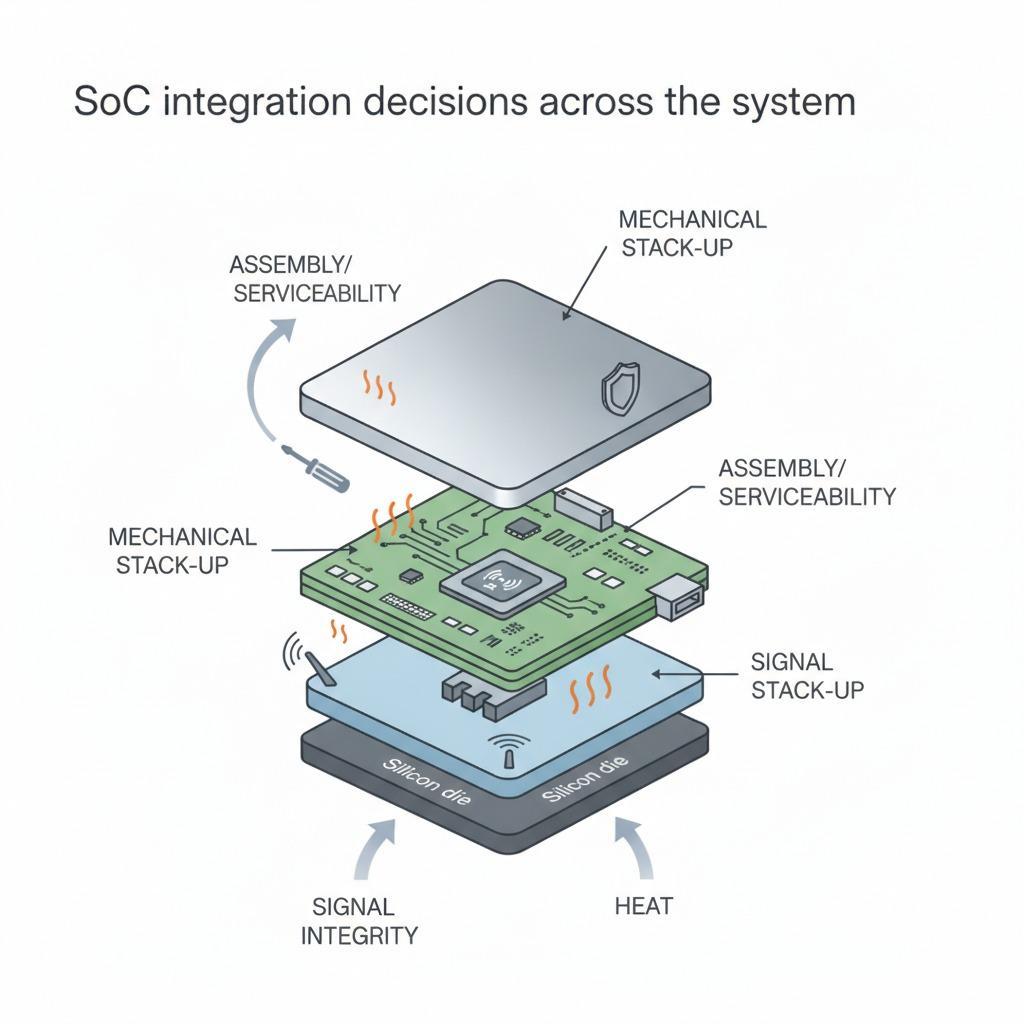
1. システムオンチップ(SoC)の統合が、シリコンレベルだけでなく、ボードレベルの決定事項となった理由 2. SoC統合が解決する問題と、ひっそりと複雑化させる可能性のある問題 3. クイックリファレンス:統合が最も役立つ場面 4. 設計エンジニアが着手する前に検討すべき設計要素 5. チームが小型化を早々に追求する際に陥りがちなよくある間違い 6. 調達チームと製品チームのための実践的なバイヤー向けアドバイス 7.次のステップとして適切なものは何か

1. 複雑な空域運用がなぜより困難な工学的問題になりつつあるのか 2. 実際に問題を難しくしている要因は何か 3.購入者が比較すべき主要な機能 4. マーケティング用語に惑わされずにソリューションを評価する方法 5. 導入を遅らせるよくある間違い 6.現実的な購買決定とはどのようなものか 7. 購入者が次のステップのために行うチェックリスト