







Blog List
首页
Blog List

通过 凌波微步 与全球受众建立信任、忠诚度和盈利的关系。

1. 为什么直线跟踪经常失败 2. 快速参考:机动跟踪器必须处理哪些情况 3. 机动目标跟踪的核心方法 4. 利用运动特征改进估计 5. 工程师和采购人员的选择标准 6. 常见的实施错误 7. 常见问题解答 8. 实际的下一步

关于比赛 荣誉背后 关于 Linpowave 展望未来

1. 为什么在车轮、滑橇或旋翼靠近地面之前发出近地警告至关重要 2. 该系统真正试图阻止的是什么 3. 买家应比较的关键功能 4. 地形净空监测 5. 地面效应探测 6. 安全着陆点选择 7. 选择错误通常发生在哪里 8. 为工程师和采购团队提供的实用建议 9. 常见问题:规格审查中经常出现的一些问题 10. 地面接近警告是否仅适用于固定翼飞机? 11. 地形数据库本身就能解决这个问题吗? 12. 执行不力的最大风险是什么? 13. 明智的下一步该怎么做?

1. 为什么能源中性运行正成为一个重要的设计目标 2. 该术语在实际应用中的含义 3. 通常情况下,最大的节省来自哪里? 4. 如何在实施前评估解决方案 5. 浪费时间和预算的常见错误 6. 这对采购和产品决策意味着什么 7. 常见问题解答 8. 买家和工程团队的下一步行动

1. 为什么城市无人机导航比看起来更难 2. 实际问题:最后20米是风险最大的部分 3. 一个好用的城市导航系统需要什么 4. 买家不应忽视的选择标准 5. 城市无人机部署中的常见错误 6. 良好部署的范例 7. 常见问题:买家经常需要的简短答案 8. 工程和采购团队的下一步工作

1. 为什么树叶穿透感知在实际部署中至关重要 2. 这项技术试图解决什么问题 3. 快速参考:不同方法通常适用于哪些情况 4. 比标题范围更重要的选择标准 5. 买家常犯的错误 6. 如何评估供应商或系统概念 7. 实用买家建议 8. 常见问题:买家通常需要的简短答案 9. 下一步该怎么做

1. 当 GPS 定位不足时,参考点定位为何如此重要 2. 参考点定位试图解决什么问题 3. 基于雷达的方法:它们的适用场景以及团队为何考虑采用它们 4. 六自由度定位如何改变对话 5. 比亮眼参数更重要的选择标准 6. 买家常犯的错误 7. 为采购和工程团队提供的实用建议 8. 常见问题解答:项目团队的快速解答 9. 下一步该怎么做
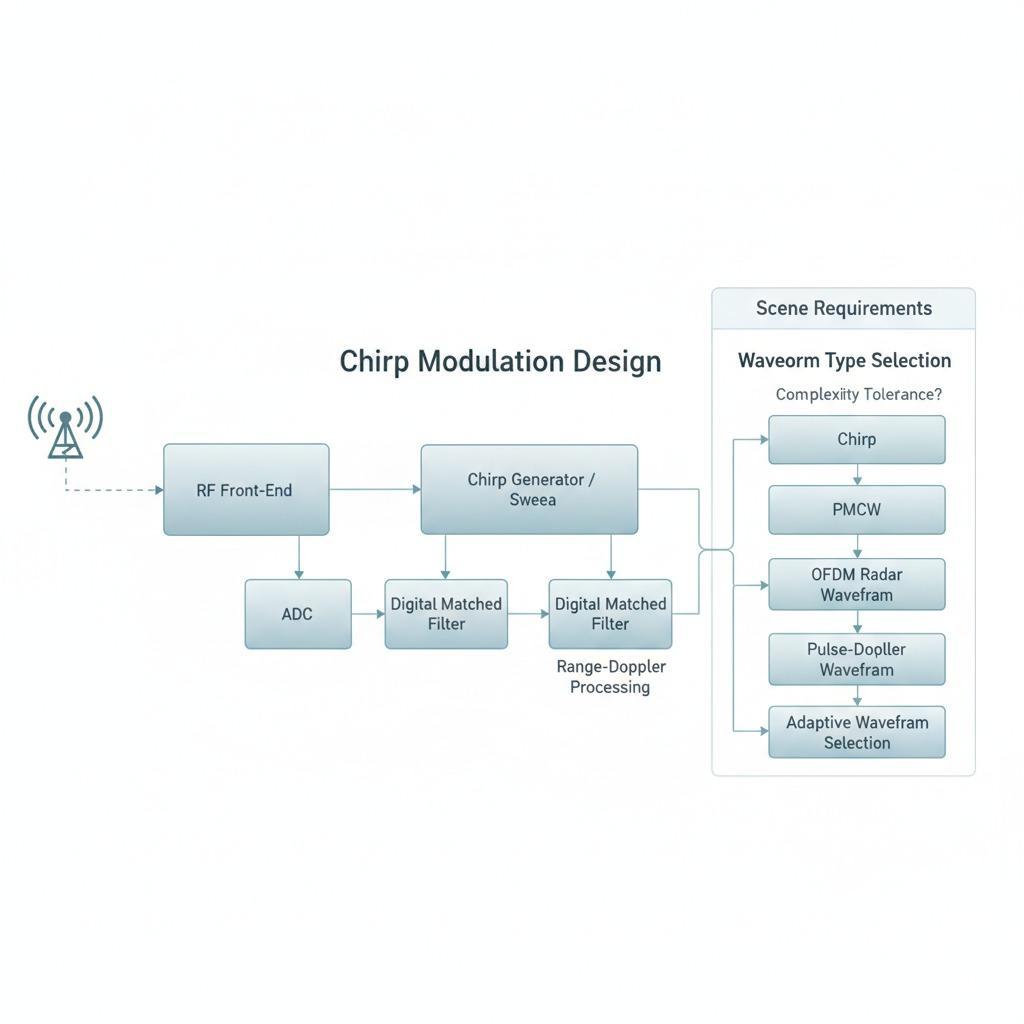
1. 为什么线性调频调制设计在现代雷达中仍然重要 2. 啁啾调制解决的是什么问题 3. 主要波形选项及其适用场景 4. 如何考虑自适应波形选择 5. 真正影响决策的选择标准 6. 买家和工程师常犯的错误 7. 务实的购买视角 8. 常见问题解答 9. 下一步

1. 为什么远程身份识别合规性正逐渐成为一个采购问题,而不仅仅是一个监管问题? 2. 该需求试图解决什么问题 3. 它如何影响超视距飞行和高风险作业 4. 面向注重合规性的团队的快速买家核查清单 5. 买家仍然常犯的错误 6. 一个切实可行的解决方案应该是什么样的 7. 购买前应该问什么 8. 采购和工程团队的下一步工作

1. 为什么远程身份识别合规性已成为一个实际的采购问题 2. 远程识别究竟解决了什么问题 3. 买家需要考虑的关键权衡因素 4. 安全风险评估的适用范围 5. 保护隐私的传感技术以及买家必须权衡的因素 6. 采购和项目设置中的常见错误 7. 一个合理的遴选过程是什么样的? 8. 买家在做出决定前应该问的问题 9. 工程和采购团队的下一步工作

1. 为什么动态包络保护在快速变化的系统中至关重要 2. 保护层实际发挥的作用 3. 该功能发挥作用的关键用例 4. 买家在签字前应该比较哪些因素 5. 团队常犯的错误 6. 实用选择建议 7. 良好的信封防护在实际应用中应该具备怎样的感受 8. 下一步

1. 当集中式感知开始失效时 2. 为什么建筑设计选择至关重要 3. 真正有效的去中心化是什么样的 4. 买家不应忽略的选择标准 5. 实际项目中的常见错误 6. 决策者在购买前应该问哪些问题 7. 常见问题解答 8. 最好的项目最终会去哪里